Для управления вектором тяги в РДТТ крепить весь двигатель в подвесе нецелесообразно (за исключением, пожалуй, верньерных двигателей), поэтому в распоряжении проектировщиков
Рис. 117. Сопловые тримеры
остаются следующие решения: установка в сопле механических регулирующих поверхностей, отклоняющих газовую струю, поворот сопла или его части, вторичная инжекция и использование дополнительных управляющих сопел (подобно тому, как это делается в ЖРД).
К механическим регулирующим поверхностям относятся, кроме обсуждавшихся выше газовых рулей и дефлекторов, вдвижные и поворотные триммеры, показанные на рис. 117. Воздействие отклоняющих поверхностей на газовую струю можно приближенно рассчитать по теории сверхзвукового обтекания профиля, но для получения точных значений управляющей силы (составляющей силы тяги, перпендикулярной оси двигателя) в зависимости от величины отклонения необходимы, измерения. В работе сообщается, что сопла с таким управлением газовой струей позволяют с хорошей воспроизво димостью получить максимальные боковые силы, достигающий осевой составляющей тяги. Несмотря на то что улрав ление векотором тяги с помощью подвижных механических поверхностей приводит к потерям тяги вследствие дополнительного сопротивления и требует кропотливых опытно-конструкторских и технологических работ, направленных на обеспе-: чение их прочности и целостности в условиях высоких динамических давлений, температур и тепловых потоков, они успешна применялись в таких ракетах, как «Поларис» и «Бомарк».
Поворотные сопла обеспечивают наиболее эффективное механическое управление газовой струей, поскольку они не вызы вают существенного снижения тяги и конкурентоспособны по, массовым характеристикам. Одним из примеров использований такого технического решения является применявшаяся на первой ступени ракеты «Минитмен» сборка из четырех поворотных сопел с карданным подвесом и шаровым шарниром.
Система позволяла управлять вектором тяги в плоскостях рыскания, тангажа и крена без заметных потерь тяги, причем угол отклонения газовой струи зависел линейно от поворота соплового блока.
Дальнейшее совершенствование методов управления вектором тяги связывают с более современными схемами, позволяющими исключить применение карданного подвеса и подвижных горячих металлических частей, размещаемых в сопле РДТТ. К таким схемам относятся: а) разработанная для РДТТ межорбитальных буксиров система подвески сопла типа «техрол» (см. рис. 148 в гл. 11); б) используемая в двигателе разгонного модуля система управления вектором тяги с соплом на шарнирном подвесе (см. рис. 150 в гл. 11); в) используемая в твердотопливном ускорителе ВКС «Спейс Шаттл» схема крепления сопла на гибкой опоре. Рассмотрим последнюю схему более подробно.
На рис. 118 изображена кормовая сборка ТТУ и показано расположение агрегатов системы управления вектором тяги, а на рис. 119 показано устройство гибкого соединительного узла сопла. Соединительный узел представляет собой оболочку из гибкого эластичного материала с 10 стальными кольцевыми прокладками дугообразного сечения. Первое и последнее армирующие кольца прикреплены к неподвижной части сопла, которая соединена с корпусом двигателя. Исполнительные механизмы поворотного сопла работают от вспомогательного энергоблока . Он состоит из двух отдельных гидронасосных агрегатов, которые передают гидравлическую энергию на рабочие сервоцилиндры, причем один обеспечивает поворот сопла в плоскости скольжения, а другой - в плоскости бокового разворота (рис. 120). Если один из агрегатов отказывает, гидравлическая мощность другого увеличивается и он регулирует отклонение сопла в обоих направлениях. Начиная с операции отделения ускорителя вплоть до его входа в воду, приводы поддерживают сопло в нейтральном положении. Сервоцилиндры ориентированы наружу под углом 45° к осям тангажа и рыскания летательного аппарата. Отметим, что вспомогательный энергоблок, питающий приводы системы управления вектором тяги в рассматриваемом РДТТ, работает на жидком однокомпонентном топливе - гидразине, который подвергается в газогенераторе каталитическому разложению на катализаторе в форме алюминиевых таблеток, покрытых иридием.
10.3.1. ВТОРИЧНАЯ ИНЖЕКЦИЯ
Способ инжекции в сопло РДТТ вспомогательного рабочего вещества для управления вектором тяги был предложен в конце 1940-х гг. и начал применяться в серийных летательных
аппаратах в начале 1960-х гг. К используемым для этих целей веществам относятся такие инертные жидкости, как вода и фреон-113, а также жидкости, взаимодействующие с водородом в продуктах сгорания и двухкомпонентные топлива (например гидразин
Рис. 121 иллюстрирует механизм влияния инжекции на поле течения в сопле. Кроме того, что впрыскиваемая жидкость замещает часть выхлопных газов, инжекция приводит к образованию системы скачков уплотнения (скачок отрыва и индуцированный головной скачок уплотнения). Боковая составляющая реактивной силы возникает как следствие двух эффектов: во-первых, поток импульса вещества, впрыскиваемого через
Рис. 118. (см. скан) Нижняя сборка твердотопливного ускорителя ВКС «Спейс Шаттл» - кабель электропитания (12 шт.); 2 - опорный шпангоут; 3 - система управления вектором тяги (2 шт.); 4 - гаргрот; 5 - передний сопловой блок; 6 - твердотопливный заряд; 7 - стыковочный шпангоут; 8 - блок телеметрической аппаратуры; 9 - бандажные кольца; 10 - двигатели системы отделения ТТУ (4 блока); тепловой экран.

(кликните для просмотра скана)

Рис. 121. Механизм вторичной инжекции. 1 - пограничный слой; 2 - скачок отрыва; 3 - граница отрывного течения; 4 - инжекционное отверстие; 5 - головной скачок уплотнения; 6 - граница зоны инжекции.
отверстие, приводит к появлению боковой реактивной силщ во-вторых, дополнительная боковая сила создается благодаря изменению распределения давления на стенке сопла. Второй эффект увеличивает боковую составляющую по сравнению случаем, когда инжекция жидкости осуществляется не в а прямо в окружающую атмосферу. Например, при вдуве в сопло наблюдалось увеличение боковой силы в 2-3 раза . Эффективность такой системы управления вектором тяги в плоскостях рыскания и тангажа для РДТТ с одним центральным соплом зависит от расположения впускного отверстия и расхода инжектируемого вещества. Величину боковой составляющей при вдуве в сопло газа или впрыске неиспаряющейся жидкости можно рассчитать другим (отличным от описанного в разд. 10.2) способом, аппроксимируя форму граничной поверхности между впрыснутым веществом и основным потоком полуцилиндром с полусферическим основанием.
Со стороны основного потока на эту поверхность действует сила давления, параллельная стенке и пропорциональная где радиус цилиндра, среднее статическое давление в ядре потока. Пренебрегая испарением, смешением и вязкими силами на граничной поверхности, запишем условие баланса между потоком количества движения впрыскиваемой жидкости, параллельным стенке, и силой давления:
где расход (считается равным асимптотическому расходу жидкости, параллельному стенке), асимптотическая
скорость инжектируемого вещества. Если предположить, что достигается в результате изоэнтропического расширения жидкости от давления торможения до давления то это известный параметр, зависящий только от и термодинамических свойств впрыскиваемого вещества. Следовательно,
![]()
Сила, нормальная к стенке, имеет три составляющие: 1) нормальная скорость на срезе впускного отверстия), 2) разность между силами давления на выходе из отверстия при наличии и в отсутствие инжекции и 3) разность между интегралом по внутренней поверхности сопла от давления на стенке при наличии и в отсутствие инжекции. При достаточно малых углах раствора сопла выражение для боковой силы имеет вид
где авых - полуугол раствора выходного раструба сопла, безразмерный коэффициент, зависящий от геометрических характеристик сопла, места расположения впускного отверстия и отношения удельных теплоемкостей вещества в выхлопной струе. Расчет по такой формуле хорошо согласуется с экспериментальными данными .
Если требуется управление вектором тяги в плоскости крена, то можно использовать два сопла или установить в выходном раструбе пару тонких продольных разделительных ребер и впрыскивать жидкость через соответствующие отверстия . Из рис. 122 видно, что отверстия обеспечивают управление по тангажу, отверстия по рысканию, а совместный впрыск или крену. В аэродинамической трубе с водой в качестве впрыскиваемой жидкости проведено параметрическое исследование распределения давления в таком сопле и его изменения в зависимости от отношения расходов вторичного и основного потоков, а также определено оптимальное положение впускных отверстий для вторичной инжекции . Эти результаты были затем использованы при разработке специального устройства, в котором сжигали малоразмерный заряд монотоплива на основе ПХА, а в сопло впрыскивали фреон-113 (рис. 123). Двигатель устанавливали в двух прецизионных подшипниках, позволяющих ему совершать свободное (без трения) движение в плоскости крена. Вращательный момент измеряли с помощью двух балок, приваренных перпендикулярно к переходной муфте, скрепленной с передним днищем РДТТ. Балки жестко заделывались в стенд и при приложении крутящего момента подвергались изгибу. Измерительный мост с тензодатчиками,

Рис. 122. Схематическая диаграмма центрального сопла РДТТ, обеспечиваю щего управление по трем осям .
размещенный на балках, давал сигнал, изменяющийся пропорционально моменту.
Результаты, представленные на рис. 124, показывают, что расположение впускных отверстий инжектируемого вещества слабо влияет на вращательный момент, давая отклонения лишь на 10-15% (это не удивительно, так как положение отверстий выбиралось на основе испытаний с холодным рабочим телом), а снижение удельного импульса, обусловленное

Рис. 123. Схема стендовой установки .
Рис. 124. (см. скан) Экспериментальные данные по зависимости от инжектируемого расхода отношения крутящего момента к тяге (а) и удельного импульса и дополнительной осевой составляющей тяги (б).
установкой в сопле продольных ребер, компенсируется впрыском жидкости, причем с увеличением расхода жидкости удельный импульс возрастает.
Что такое Управление вектором тяги?
Управление вектором тяги
Управление вектором тяги
отклонение реактивной струи ТРД или струи, образуемой при вращении винта ТВД от направления, соответствующего крейсерскому режиму полёта, для создания дополнительной подъёмной, управляющей или тормозящей силы. У. в. т. применяется для сокращения длины разбега и пробега (СКВП, СВВП), а также при маневрировании в полёте. Отклонение реактивной струи при У. в. т. осуществляется с помощью отклоняющих устройств (ОУ), которые являются элементами конструкции двигателя или самолёта. В СВВП У. в. т. достигается также использованием подъёмных ТРД или вентиляторов, расположенных в фюзеляже или крыле, либо при использовании ТВД поворотом их в вертикальной плоскости.
ОУ двигателей подразделяются на два типа. К первому относятся поворотные сопла или решётки, выполняющие при крейсерском режиме функции прямого сопла, и плоские сопла с подвижными стенками. ОУ второго типа имеют створки, перекрывающие тракт сопла или установленные за выходным сечением сопла. В этом случае отклонение реактивной струи осуществляется непосредственно створками. К таким ОУ относится реверсивное устройство. ОУ (кроме реверсивных устройств) имеют коэффициент тяги -
не ниже 0,94-0,96, где Р - тяга, создаваемая ОУ, Рид - идеальная тяга ОУ при том же расходе газа.
В ОУ самолётов отклонение реактивной струи двигателя осуществляется закрылками: при обдуве струёй закрылка снизу или при обдуве крыла сверху; в последнем случае используется эффект прилипания струи к поверхности (см. Энергетическая механизация крыла).
Авиация: Энциклопедия. - М.: Большая Российская Энциклопедия.
Главный редактор Г.П. Свищев.
1994.
Словарь
— упорядоченный в алфавитном или тематическом порядке список заглавных слов, лексикографически обработанных.
Словарь — лексикографический продукт, который содержит упорядоченный перечень языковых единиц (слов, словосочетаний и т.п.) с короткими их характеристиками или характеристиками обозначенных ими понятий, или с переводом на другой язык.
Автомобиль, авто, машина (от греч. Αὐτός — «сам» и лат. Mobilis — «тот, что движется») — самоходная колесная машина, которая приводится в движение установленным на ней двигателем и предназначена для перевозки людей, грузов, буксировки транспортных средств, выполнения специальных работ и перевозки специального оборудования безрельсовыми дорогами. Передвигается преимущественно по суше.

Автомобиль — сложная система, совокупность механизмов и узлов, которые могут выходить из строя. Поэтому автомобили требуют регулярного технического обслуживания. Читайте Как следить по автомобилем?
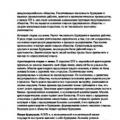
![]() Mitsubishi Motors Corporation
(яп. 三菱 自動 車 工業 株式会社 Mitsubishi Jidōsha Kōgyō Kabushiki Kaisha) (MMC) — японская автомобилестроительная компания, входит в группу Mitsubishi
— крупнейшей производственной группы Японии. Штаб-квартира — в Токио. В 1970 году Mitsubishi Motors была сформирована из подразделения Mitsubishi
Heavy Industries.
Mitsubishi Motors Corporation
(яп. 三菱 自動 車 工業 株式会社 Mitsubishi Jidōsha Kōgyō Kabushiki Kaisha) (MMC) — японская автомобилестроительная компания, входит в группу Mitsubishi
— крупнейшей производственной группы Японии. Штаб-квартира — в Токио. В 1970 году Mitsubishi Motors была сформирована из подразделения Mitsubishi
Heavy Industries.
На «слаломе» крены идентичны, то есть тоже велики, но при этом недостаточной поворачиваемости нет и в помине! На той же скорости, где «бессистемная» версия вовсю скользила передком, Outlander Sport просто поворачивает и едет дальше. Особенно разителен контраст на дуге с уменьшающимся радиусом, где поведение автомобиля показалось и вовсе нереальным. Если обычная версия с трудом смогла пройти это упражнение на скорости 30 км/ч, то новая модификация, имеющая S-AWC, с легкостью выполнила его и на 40 км/ч.
Гораздо увереннее машина ведет себя и на круге (скольжение начинается позже), и при «переставке», которую также удается пройти на более высокой скорости и, в отличие от обычной версии, при практически полном отсутствии сноса. Словом, поведение Outlander Sport в предельных режимах иначе как чудесным не назовешь - кроссовер словно игнорирует законы физики. Посмотрим теперь, будет ли заметна разница при езде по дорогам общего пользования.
Почти спортсмен
Сначала вспомним ощущения от езды на обычном Outlander, без приставки Sport в названии, то есть без S-AWC. Кроссовер отлично стоит на прямой, игнорирует неровности и колейность, но при быстром входе в повороты у водителя возникает чувство неуверенности из-за больших кренов и нехватки реактивного усилия на руле. Но если ехать спокойно, все приходит в норму. Плавность хода на высоте, хотя с откровенно разбитым асфальтом шасси уже не справляется. Впрочем, в окрестностях Санкт-Петербурга, где проходил тест, дороги местами так плохи, что впору ехать не на автомобиле, а на танке. Из недостатков отмечу явное ухудшение плавности хода на заднем диване по сравнению с передними сиденьями. Кроме того, пассажиры второго ряда почти не слышат сидящих впереди из-за сильного шума шин.
Стоит сказать, что этот автомобиль был 2013 года выпуска. А в 2014 г. кроссовер получил весьма существенные доработки. Так что у меня есть возможность не только выяснить, как едет модификация Outlander Sport, но и оценить на практике другие новшества. В первую очередь отмечаю более собранную подвеску, которая стала чуть подробнее повторять микропрофиль асфальта. Зато обновленное шасси лучше держит серьезные удары и при обычных режимах езды сильнее сопротивляется кренам. Эту подвеску с 2014 г. получили все модификации Outlander.
А вот более тугой руль - прерогатива исключительно версии Outlander Sport. И ощущения от автомобиля стали совсем другими: он словно напряг мускулы, и я больше не испытываю неуверенности при быстром прохождении виражей. Более того, в поведении кроссовера появились спортивные нотки! Такой автомобиль мне нравится гораздо больше.
Кроме того, значительно улучшен комфорт для задних пассажиров, в первую очередь - акустический. Все модификации Outlander 2014 года выпуска получили дополнительную шумоизоляцию, и это заметно «невооруженным ухом» - теперь я спокойно разговариваю с водителем, сидя на заднем диване. А более жесткая подвеска, на удивление, оказалась менее тряской. Да-да, такое бывает при правильной настройке шасси.
Что касается S-AWC, то при обычной езде ее работа не ощущается никак. Этого и следовало ожидать. Система делает свое дело незаметно, за что честь ей и хвала. Словом, с каждым годом Mitsubishi Outlander становится все лучше. В 2015 г. кроссоверу предстоит глобальное обновление. А значит, ждем новой встречи.
Технические характеристики Mitsubishi Outlander Sport 3.0
Активный дифференциал звучит заманчиво, высокотехнологично, и при покупке кроссовера или внедорожника его захочется приобрести, но что это на самом деле, каковы его функции, и действительно ли он так необходим? Эти самые важные вопросы и будут исследованы в процессе сравнительного теста внедорожников Mitsubishi Outlander с двумя разными трансмиссиями: с обычным дифференциалом и с новым активным дифференциалом S-AWC.
Для сравнительного анализа работы в различных условиях были взяты два совершенно одинаковых автомобиля Mitsubishi Outlander , с той лишь разницей, что у одного Outlander спереди установлен традиционный открытый дифференциал, а у другого – система активного дифференциала S-AWC, которая с осени 2014 года устанавливается на эти кроссоверы, оснащенные шестицилиндровым бензиновым двигателем объемом 3 литра.
S-AWC - умная система полного привода, разработанная компанией Mitsubishi. Является аббревиатурой фразы «Super All Wheel Control», которую можно перевести как «Контроль за всеми колесами супер-уровня».
Система S-AWC устанавливается на автомобили в комплектации «Спорт», которая на 20 000 рублей дороже комплектации «Алтимета» . Практически вся эта сумма и является стоимостью активного дифференциала.
В обычных условиях очень сложно выявить разницу в поведении этих автомобилей с разными дифференциалами, так как она проявляется только в моменты потери кроссовером траектории и курсовой устойчивости, когда уходит с дуги при повороте или маневрирует по дороге с очень неравномерным коэффициентом сцепления (например, лед – асфальт).
Outlander покоряет повороты
 Первый на очереди был тест по прохождению поворота на обычном асфальтовом покрытии. В начале этого тестирования создается впечатление, что и ходовые качества автомобилей одинаковы, но это до поры до времени – проверяли то их на различных скоростях! Так вот, Mitsubishi Outlander с обычным дифференциалом, начиная с определенной скорости, а чем выше она была, тем ярче проявлялась его манера распрямлять траекторию поворота. То есть, чем выше скорость вхождения в поворот, тем сильнее он отклоняется наружу под действием центробежной силы.
Первый на очереди был тест по прохождению поворота на обычном асфальтовом покрытии. В начале этого тестирования создается впечатление, что и ходовые качества автомобилей одинаковы, но это до поры до времени – проверяли то их на различных скоростях! Так вот, Mitsubishi Outlander с обычным дифференциалом, начиная с определенной скорости, а чем выше она была, тем ярче проявлялась его манера распрямлять траекторию поворота. То есть, чем выше скорость вхождения в поворот, тем сильнее он отклоняется наружу под действием центробежной силы.
Центробежная сила - это фиктивная сила, которая возникает из-за инерции тела во вращающейся системе отсчёта. Тело стремится двигаться прямо, поэтому, когда его «заворачивают» к центру, оно стремится от этого центра «отодвинуться».
Более того, этот симптом не зависит от того, движется ли кроссовер без тяги, или при нажатой педали газа. «Аутлендер» с активным дифференциалом S-AWC гораздо охотнее следует по заданной траектории. Явно выраженная у обычного Outlander недостаточная поворачиваемость сменилась на нейтральную: теперь кроссовер начинает плавно скользить боком, но всеми его четырьмя колесами. При этом сохраняет и траекторную, и курсовую устойчивость. На деле это проявится в лучшем сохранении траектории движения при увеличении скорости на поворотах, а значит у водителя будет больше шансов остаться на своей полосе движения, а не вылететь на встречную полосу или в кювет.
Следует учесть, что оба кроссовера отличаются между собой еще и настройками стабилизирующей электроники. Модель без S-AWC просто отключает подачу топлива, если происходит резкая потеря сцепления с дорогой, тем самым не позволяя корректировать траекторию движения автомобиля с помощью тяги. В то же время, Outlander, оснащенный системой активного дифференциала S-AWC не убирает совсем крутящий момент двигателя, а только ограничивает его. И еще, было замечено, что поведение автомобилей отличается при движении накатом. При этом активный дифференциал не включен в работу (то есть на передние колеса тяга не передается). Таким образом, очевидно, что новая версия обрела комплексные доработки, а не просто только лишь новую деталь.
Движение по окружности
Одним из этапов выявления различий между «Аутлендерами» было движение по кругу диаметром 30 метров, обозначенным вешками. В обычном «Мицубиси Аутлендер», оснащенном полным приводом с электронным управлением, имеется переключатель трех режимов работы: полный привод с умным распределением тяги между осями (4WD Auto), полный с заблокированной муфтой (4WD Lock) и передний привод с подключением задней оси (4WD Eco). На переключателе нанесено стандартное обозначение 4WD. В автомобилях с трансмиссией S-AWC добавлен еще один, четвертый, режим под названием Snow (Снег), который с помощью электроники обеспечивает оптимальную тягу на всех колесах на скользком покрытии.
 При движении по кругу средняя скорость в обоих вариантах держалась на уровне около 50 км/ч. Проверяли движение в разных направлениях, с разным давлением на педаль газа, с различным состоянием системы стабилизации. В итоге «активный» Outlander постоянно оказывался немного быстрее – на доли секунды, но если отключить систему стабилизации, то временной разрыв увеличивается.
Да, разрыв небольшой, но водитель, сидящий за рулем испытуемых моделей, испытывает совершенно другие ощущения. Во время управления обычным Outlander необходимо выставить руль на требуемый угол поворота, нажимать на акселератор и не производить действий рулем. Вернутся на прежнюю траекторию движения, при возникновении заноса на повороте, помогало только сбрасывание скорости, а действия рулем ни к чему не приводили. А система стабилизации не позволяла увеличить скорость. Совсем другие ощущения возникали при управлении кроссовером с активным дифференциалом, который вернул чувство реального управления автомобилем, а не игровым роботом – симулятором. Здесь, когда возникает занос или предчувствие его возникновения, просто необходимо довернуть руль на необходимый градус, немного поднажать на педаль акселератора, и все – машина уже на своей траектории! Таким образом, Outlander с активной трансмиссией S-AWC становится более безопасным и предсказуемым в управлении.
При движении по кругу средняя скорость в обоих вариантах держалась на уровне около 50 км/ч. Проверяли движение в разных направлениях, с разным давлением на педаль газа, с различным состоянием системы стабилизации. В итоге «активный» Outlander постоянно оказывался немного быстрее – на доли секунды, но если отключить систему стабилизации, то временной разрыв увеличивается.
Да, разрыв небольшой, но водитель, сидящий за рулем испытуемых моделей, испытывает совершенно другие ощущения. Во время управления обычным Outlander необходимо выставить руль на требуемый угол поворота, нажимать на акселератор и не производить действий рулем. Вернутся на прежнюю траекторию движения, при возникновении заноса на повороте, помогало только сбрасывание скорости, а действия рулем ни к чему не приводили. А система стабилизации не позволяла увеличить скорость. Совсем другие ощущения возникали при управлении кроссовером с активным дифференциалом, который вернул чувство реального управления автомобилем, а не игровым роботом – симулятором. Здесь, когда возникает занос или предчувствие его возникновения, просто необходимо довернуть руль на необходимый градус, немного поднажать на педаль акселератора, и все – машина уже на своей траектории! Таким образом, Outlander с активной трансмиссией S-AWC становится более безопасным и предсказуемым в управлении.
Скольжение по базальту
Коэффициент сцепления колес с влажным базальтом примерно такой же как и со льдом и в таких условиях испытуемые модели Mitsubishi Outlander проявили существенные отличия в своем поведении. «Активный» Митцубиси при езде змейкой вполне допускает небольшую раскачку и больше подвержен заносу.
Занос - нарушение направления движения транспортного средства вдоль продольной плоскости.
Но это не страшно, так как в случае чего вмешается электроника: при приближении к углам, близких к критическим, она выключает тягу и частично берет на себя управление, что делает вождение такого кроссовера более интересным и одновременно безопасным.
 По разгону с места на этом же покрытии «Аутлендер» с активным дифференциалом опять оказался впереди – он стартовал увереннее с меньшей пробуксовкой колес, тогда как кроссовер с обычным дифференциалом намеревался уйти в сторону, но система стабилизации это сразу же исправляла. Разница в движении при нахождении на скользком покрытии всего автомобиля или какой – либо его частью не наблюдалась.
По разгону с места на этом же покрытии «Аутлендер» с активным дифференциалом опять оказался впереди – он стартовал увереннее с меньшей пробуксовкой колес, тогда как кроссовер с обычным дифференциалом намеревался уйти в сторону, но система стабилизации это сразу же исправляла. Разница в движении при нахождении на скользком покрытии всего автомобиля или какой – либо его частью не наблюдалась.
Для чего нужен S-AWC
Тестовые Mitsubishi Outlander оснащены довольно мощным двигателем , развивающим 230 л.с., но считать его спортивным кроссовером не приходится и даже установленный в один из них активный дифференциал скорости фактически не добавляет. Трансмиссия S-AWC дает выигрыш на трассе лишь в доли секунды, поэтому его основным предназначением является повышение активной безопасности, которое проявляется не только при движении под тягой, но и при резком сбросе газа. Также активный дифференциал может помочь и при движении по бездорожью – в данном случае у водителя появляется блокировка передка с электронным управлением. Но это все же не внедорожник, и на серьезном бездорожье активный дифференциал не поможет – скорее всего перегреется меж осевая муфта, и до помощи умной конструкции дело может не дойти.
 В спорте и в процессе повседневной езды активный дифференциал выполняет разные задачи: гонщик с ним развивает большую скорость, а простой водитель получает большую безопасность авто, так как уменьшается склонность автомобиля к заносу. И в то же время в сложной ситуации активный дифференциал позволяет человеку, не обладающему глубокими навыками вождения, избежать многих ошибок. Для профессионалов, возможно, автомобиль с обычным дифференциалом даже будет интереснее с позиции управления, так как он дает возможность остаться один на один с машиной без вмешательства электроники.
В спорте и в процессе повседневной езды активный дифференциал выполняет разные задачи: гонщик с ним развивает большую скорость, а простой водитель получает большую безопасность авто, так как уменьшается склонность автомобиля к заносу. И в то же время в сложной ситуации активный дифференциал позволяет человеку, не обладающему глубокими навыками вождения, избежать многих ошибок. Для профессионалов, возможно, автомобиль с обычным дифференциалом даже будет интереснее с позиции управления, так как он дает возможность остаться один на один с машиной без вмешательства электроники.
Так, что переплатить 20 000 рублей за такой умный активный дифференциал при цене автомобиля в полтора миллиона определенно стоит!
Схема работы активного дифференциала на «Аутлендере»
Принцип работы активного дифференциала S-AWC основан на реализации управления вектором тяги, но схема его работы на Lancer Evolution и на Mitsubishi Outlander существенно отличаются. Так, на Evolution активный дифференциал стоит на задней оси и добавляет тягу на наружном, по отношению к выполняемому повороту, колесе, убирая недостаточную поворачиваемость. Это осуществляют два сцепления, каждое из которых направляет крутящий момент на свое колесо.
А вот схема работы S-AWC на Outlander совершенно иная, хотя бы потому уже, что он установлен на передней оси. Главную роль играет здесь многодисковый фрикцион, который выполняет роль мягкой блокировки. Для сжатия фрикционов электроника в нужный момент посылает опережающий сигнал, а механический самоблок действовал бы с небольшим опозданием. Активный электроусилитель руля на тестируемом Mitsubishi приводит к компенсации работы дифференциала, убирая резкое подруливание из-за разницы в моментах на правом и на левом передних колесах, что не позволяет баранке вырываться из рук. Естественно, что любая нештатная ситуация не происходит без вмешательства в нее электронной системы стабилизации кроссовера, которая ограничивает мощность двигателя и тормозные механизмы, прихватывающие колеса .
S-AWC: история создания
 Первыми создали его и ввели это понятие в обиход японцы. Так, еще в 1996 году компания Mitsubishi установила первый активный дифференциал на задней оси «Лансера Эво IV» с полным приводом, а в 1997 году компания «Хонда» установила систему распределения крутящего момента на купе «Прелюд» с передним приводом. Как ни странно, но немцы, которые всегда в числе первых, если не создают, то устанавливают высокотехнологичные вещи, в этот раз начали внедрять новинку только к 2007 году (хотя какая это уже новинка!). Такие узлы в качестве опции стали доступными на BMW-Х6 и Audi S4, но а уже по-настоящему массовым активный дифференциал стал уже только для Lancer Evolution. На сегодняшний день можно с уверенностью утверждать, что функцию распределения момента между колесами предлагает около половины автопроизводителей. Однако, не стоит забывать, что это не специальная механика, а всего лишь ее электронная имитация.
Первыми создали его и ввели это понятие в обиход японцы. Так, еще в 1996 году компания Mitsubishi установила первый активный дифференциал на задней оси «Лансера Эво IV» с полным приводом, а в 1997 году компания «Хонда» установила систему распределения крутящего момента на купе «Прелюд» с передним приводом. Как ни странно, но немцы, которые всегда в числе первых, если не создают, то устанавливают высокотехнологичные вещи, в этот раз начали внедрять новинку только к 2007 году (хотя какая это уже новинка!). Такие узлы в качестве опции стали доступными на BMW-Х6 и Audi S4, но а уже по-настоящему массовым активный дифференциал стал уже только для Lancer Evolution. На сегодняшний день можно с уверенностью утверждать, что функцию распределения момента между колесами предлагает около половины автопроизводителей. Однако, не стоит забывать, что это не специальная механика, а всего лишь ее электронная имитация.
Видео Mitsubishi Outlander преодолевает бездорожье и снег

Дифференциальное уравнение
Как работает система управления вектором тяги
Дифференциальное уравнение
Как работает система управления вектором тяги
Павел Михайлов, опубликовано 02 мая 2017
Фото: Фирмы-производители
Д ифференциал есть в любом автомобиле, но зачем он нужен? А что такое «активный дифференциал» с функцией torque vectoring — и почему он помогает поворачивать? Давайте выясним!
В движении все колеса автомобиля вращаются с разной скоростью. Хотя бы потому, что дорога неровная, и если одно из колес наезжает на кочку, то оно проходит большее расстояние, чем все остальные, которые едут по ровной дороге. А в повороте все совсем плохо: каждое из четырех колес едет по собственному радиусу (обратите внимание на следы, оставляемые автомобилями на снегу).
И если для неведущих колес это не проблема, то с приводными все не так просто. Когда два ведущих колеса соединены жестким валом, то шины будут постоянно пробуксовывать или проскальзывать, а значит, быстро изнашиваться. При этом возрастет расход топлива, да и управляться автомобиль будет хуже. Чтобы избежать этих проблем, автомобили оснащают дифференциалами.
Изобретателем дифференциала считается французский математик Онесифор Пеккёр, а само событие датируется 1825 годом. Хотя, по некоторым данным, подобное устройство существовало еще в Древнем Риме, но вопрос истории давайте оставим специалистам. В этой статье мы уделим больше внимания относительно молодой системе, известной как torque vectoring, что в переводе с английского значит «управление вектором тяги».
Для начала стоит разобраться, как вообще работает дифференциал. Он состоит из четырех основных элементов: корпуса, сателлитов, оси сателлитов и шестерен полуосей. Принцип его работы несложен: корпус дифференциала жестко соединен с ведомой шестерней главной передачи, ось сателитов жестко соединена с корпусом. Крутящий момент передается на корпус, от него на ось сателлитов и, соответственно, на сами сателлиты — а те, в свою очередь, передают усилие на шестерни полуосей.

Вспомните, как в детстве на качелях уравновешивали друга такой же комплекции — можно было зависнуть в воздухе, не касаясь земли. В дифференциале шестерни полуосей одинаковые, поэтому плечо силы для левой и правой полуоси тоже одинаковое, а значит, и крутящий момент на левом и правом колесе один и тот же.
Дифференциал позволяет колесам крутиться в разные стороны друг относительно друга. Попробуйте на подъемнике покрутить одно приводное колесо — второе будет вращаться в обратную сторону. Однако относительно автомобиля эти колеса крутятся в одну сторону — ведь корпус дифференциала тоже вращается! Это как если бы вы шли в автобусе против хода и при этом все равно удалялись от оставшегося на остановке человека. Итак, получается, что два колеса вращаются с одинаковым усилием и имеют возможность делать это с разными скоростями. Максимально наглядно это показано в видеоролике:
У такой конструкции есть недостаток: на оба колеса приходится одинаковый крутящий момент, а чтобы автомобиль лучше поворачивал, было бы неплохо подать больше крутящего момента на внешнее колесо. Тогда машина при нажатии на газ будет буквально ввинчиваться в поворот — и эффект будет выражен гораздо более ярко, чем на автомобиле с приводом на одну ось и свободным дифференциалом. Но как воплотить такую систему в реальной конструкции?
Сегодня подобные системы становятся все более популярными. Само словосочетание «torque vectoring» впервые прозвучало в 2006 году, однако подобная система, именуемая Active yaw control, появилась еще на раллийных трассах девяностых: ей был оборудован Mitsubishi Lancer Evolution IV, дебютировавший в 1996 году. Но прежде чем подробно разобраться в устройстве полноценного дифференциала с системой torque vectoring, давайте сначала взглянем на ее упрощенный аналог, используемый в автомобиле Ford Focus RS. Аналогичная система использована в трансмиссии Land Rover Discovery Sport и Cadillac XT5 .
Система довольно проста — она даже несколько проще, чем традиционный подключаемый полный привод, ведь в ней нет заднего дифференциала. Есть только две муфты, каждая из которых подключает свою полуось. При движении по прямой без скольжений автомобиль остается переднеприводным, задние колеса подключаются только при пробуксовках и в поворотах (в левом вираже — правое заднее колесо, и наоборот). На колесо может приходиться до 100% крутящего момента, идущего на заднюю ось, тем самым система компенсирует возникающую недостаточную поворачиваемось, как бы докручивая автомобиль.
А как быть, если ведущая ось только одна, и в спокойных режимах обязательно необходим дифференциал, притом открытый, а в повороте хочется подать больше крутящего момента на внешнее колесо, чтобы эффективнее контролировать машину газом, а также уменьшить недостаточную поворачиваемость?
Такие решения также существуют в современном автопроме. Например, автомобили Lexus RC F и GS F последнего поколения оснащены задним дифференциалом, умеющим распределять момент между левым и правым колесом. У такого узла в заднем редукторе главная передача вращает корпус самого обыкновенного дифференциала, там же стоят две повышающие планетарные передачи, которые с помощью пакета фрикционов могут соединить корпус дифференциала с полуосью. Таким образом, к наружному колесу подводится дополнительный крутящий момент через планетарную передачу, за счет чего и возникает эффект ввинчивания в поворот.
Аналогичное решение применено и на задней оси полноприводных BMW X6 M и X5 M — как для BMW, так и для Lexus, и для Cadillac с Land Rover систему разработала и производит фирма GKN. Различие по большому счету только в корпусе главной передачи: например, у BMW он алюминиевый, а у Lexus — чугунный. Привод фрикционных муфт обоих производителей механический, осуществляется он одинаковыми муфтами GKN.
В автомобилях Audi с опциональным спортивным дифференциалом тоже есть подобная система, но здесь не планетарные, а простые зубчатые передачи с внутренним зацеплением. Но принцип работы абсолютно такой же: с помощью пакета фрикционов соединяются две шестерни, и полуось подключается к корпусу дифференциала через повышающую передачу. Для более полного понимания можно посмотреть этот ролик:
Насколько же велик эффект от использования продвинутых дифференциалов? Американский журнал Car and Driver провел сравнительный тест двух Lexus RC F, один из которых был оснащен системой torque vectoring differential, а второй — обычным «самоблоком». Как результат, более значительные максимальные ускорения, меньший угол поворота руля и лучшее время на круге у автомобиля с активным дифференциалом, характер автомобиля изменился в сторону избыточной поворачиваемости. И радует, что доступна она не только для спортивных автомобилей, но и для для компактного кроссевера Nissan Juke — пусть и в несколько упрощенном варианте.
Пока не стоит ожидать, что такие системы вытеснят традиционные дифференциалы — ведь они сложнее, дороже и больше нужны активным водителям. Однако с наступлением эры электромобилей появятся широчайшие возможности для управления вектором тяги: ведь если на каждое ведущее колесо приходится свой электромотор, то реализация эффекта torque vectoring станет лишь вопросом программного обеспечения.