Publicēts 11.04.2013
Koplietojama ierīce (Inrunner, Outrunner)
Bezsuku līdzstrāvas motors sastāv no rotora ar pastāvīgajiem magnētiem un statora ar tinumiem. Ir divu veidu dzinēji: Skrējiens, kurā rotora magnēti atrodas statora iekšpusē ar tinumiem, un Apsteidzējs, kurā magnēti atrodas ārpusē un griežas ap stacionāru statoru ar tinumiem.

Shēma Skrējiens parasti izmanto ātrgaitas motoriem ar nelielu skaitu polu. Apsteidzējs ja nepieciešams, iegūstiet liela griezes momenta dzinēju ar salīdzinoši zemiem apgriezieniem. Strukturāli Inrunners ir vienkāršāki, jo stacionārs stators var kalpot kā korpuss. Tam var piestiprināt stiprinājuma ierīces. Outrunners gadījumā visa ārpuse griežas. Motors tiek piestiprināts, izmantojot fiksētu asi vai statora daļas. Riteņa motora gadījumā montāža tiek veikta uz statora fiksētās ass, vadi tiek novadīti uz statoru caur dobo asi.

Magnēti un stabi
Polu skaits uz rotora ir vienmērīgs. Izmantoto magnētu forma parasti ir taisnstūrveida. Cilindriski magnēti tiek izmantoti retāk. Tie ir uzstādīti ar mainīgiem stabiem.

Magnētu skaits ne vienmēr atbilst polu skaitam. Vairāki magnēti var veidot vienu polu:

Šajā gadījumā 8 magnēti veido 4 polus. Magnētu izmērs ir atkarīgs no motora ģeometrijas un motora īpašībām. Jo spēcīgāki ir izmantotie magnēti, jo lielāku griezes momentu attīsta motors uz vārpstas.
Magnēti uz rotora tiek fiksēti, izmantojot īpašu līmi. Retāk sastopami modeļi ar magnēta turētāju. Rotora materiāls var būt magnētiski vadošs (tērauds), magnētiski nevadošs (alumīnija sakausējumi, plastmasa utt.) vai kombinēts.
Tinumi un zobi
Trīsfāzu bezsuku motora tinums ir izgatavots no vara stieples. Vads var būt viendzīslas vai sastāv no vairākiem izolētiem vadiem. Stators ir izgatavots no vairākām magnētiski vadoša tērauda loksnēm, kas salocītas kopā.

Statora zobu skaits jāsadala ar fāžu skaitu. tie. trīsfāzu bezsuku motoram statora zobu skaits jādalās ar 3. Statora zobu skaits var būt lielāks vai mazāks par rotora polu skaitu. Piemēram, ir motori ar šādām shēmām: 9 zobi/12 magnēti; 51 zobs/46 magnēti.

Motori ar 3 zobu statoru tiek izmantoti ārkārtīgi reti. Tā kā jebkurā laikā (kad to ieslēdz zvaigzne) darbojas tikai divas fāzes, magnētiskie spēki neiedarbojas vienmērīgi uz rotoru visā apkārtmērā (sk. attēlu).

Spēki, kas iedarbojas uz rotoru, mēģina to izkropļot, kā rezultātā palielinās vibrācija. Lai novērstu šo efektu, stators ir izgatavots ar lielu skaitu zobu, un tinums tiek sadalīts pa zobiem visā statora apkārtmērā pēc iespējas vienmērīgāk.

Šajā gadījumā magnētiskie spēki, kas iedarbojas uz rotoru, dzēš viens otru. Nav nelīdzsvarotības.

Iespējas fāzes tinumu sadalei pa statora zobiem
9 zobu uztīšanas iespēja

12 zobu uztīšanas iespēja

Iepriekš minētajās diagrammās zobu skaits ir izvēlēts tā, lai tas ne tikai dalās ar 3. Piemēram, kad 36 zobi veido 12 zobi katrā fāzē. 12 zobus var sadalīt šādi:




Vispiemērotākā shēma ir 6 grupas pa 2 zobiem.
Pastāv motors ar 51 zobu uz statora! 17 zobi katrā fāzē. 17 ir pirmskaitlis, tas pilnībā dalās tikai ar 1 un sevi. Kā sadalīt tinumu starp zobiem? Diemžēl literatūrā nevarēju atrast piemērus vai paņēmienus, kas palīdzētu atrisināt šo problēmu. Izrādījās, ka tinums tika sadalīts šādi:

Apskatīsim īstu tinumu ķēdi.

Ņemiet vērā, ka tinumam uz dažādiem zobiem ir dažādi tinuma virzieni. Dažādi tinumu virzieni ir norādīti ar lielajiem un lielajiem burtiem. Sīkāk par tinumu konstrukciju varat izlasīt raksta beigās piedāvātajā literatūrā.
Klasiskais tinums ir izgatavots ar vienu vadu vienai fāzei. Tie. visi tinumi uz vienas fāzes zobiem ir savienoti virknē.

Paralēli var savienot arī zobu tinumus.

Var būt arī kombinēti ieslēgumi

Paralēlais un kombinētais savienojums ļauj samazināt tinuma induktivitāti, kā rezultātā palielinās statora strāva (un līdz ar to jauda) un motora griešanās ātrums.
Elektriskais un reālais ātrums
Ja motora rotoram ir divi stabi, tad ar vienu pilnu magnētiskā lauka apgriezienu uz statora rotors veic vienu pilnu apgriezienu. Ar 4 poliem, lai pagrieztu motora vārpstu par vienu pilnu apgriezienu, ir nepieciešami divi statora magnētiskā lauka apgriezieni. Jo lielāks ir rotora polu skaits, jo vairāk elektrisko apgriezienu nepieciešams, lai vienā apgriezienā pagrieztu motora vārpstu. Piemēram, mums uz rotora ir 42 magnēti. Lai pagrieztu rotoru par vienu apgriezienu, nepieciešams 42/2 = 21 elektriskais apgrieziens. Šo īpašumu var izmantot kā sava veida reduktoru. Izvēloties vajadzīgo stabu skaitu, jūs varat iegūt motoru ar vēlamajiem ātruma parametriem. Turklāt mums būs nepieciešama izpratne par šo procesu nākotnē, izvēloties kontroliera parametrus.
Pozīcijas sensori
Dzinēju bez sensoriem konstrukcija atšķiras no dzinējiem ar sensoriem tikai tad, ja pēdējo nav. Citu būtisku atšķirību nav. Visizplatītākie pozīcijas sensori darbojas, pamatojoties uz Halla efektu. Sensori reaģē uz magnētisko lauku, tie parasti tiek novietoti uz statora, lai tos ietekmētu rotora magnēti. Leņķim starp sensoriem jābūt 120 grādiem.

Tas attiecas uz “elektriskajiem” grādiem. Tie. daudzpolu motoram sensoru fiziskais izvietojums var būt šāds:


Dažreiz sensori atrodas ārpus dzinēja. Šeit ir viens piemērs sensoru atrašanās vietai. Tas faktiski bija dzinējs bez sensoriem. Šādā vienkāršā veidā tas tika aprīkots ar halles sensoriem.

Dažos dzinējos sensori ir uzstādīti uz īpašas ierīces, kas ļauj sensorus pārvietot noteiktās robežās. Izmantojot šādu ierīci, tiek iestatīts laiks. Tomēr, ja dzinējam nepieciešama atpakaļgaita (griešanās pretējā virzienā), būs nepieciešams otrs sensoru komplekts, kas konfigurēts atpakaļgaitā. Tā kā palaišanas un zema ātruma laikā laiks nav kritisks, varat iestatīt sensorus uz nulles punktu un programmatiski pielāgot virziena leņķi, kad motors sāk griezties.
Galvenās dzinēja īpašības
Katrs dzinējs ir izstrādāts, lai atbilstu īpašām prasībām, un tam ir šādas galvenās īpašības:
- Darbības režīms kam dzinējs ir paredzēts: ilgtermiņa vai īstermiņa. Garš darba režīms nozīmē, ka dzinējs var darboties stundām ilgi. Šādi dzinēji ir konstruēti tā, lai siltuma pārnese uz vidi būtu lielāka nekā paša dzinēja siltuma izdalīšanās. Šajā gadījumā tas nesasilst. Piemērs: ventilācija, eskalators vai konveijera piedziņa. Īstermiņa - nozīmē, ka dzinējs tiks ieslēgts uz īsu laiku, kura laikā tam nebūs laika sasilt līdz maksimālajai temperatūrai, kam sekos ilgs periods, kura laikā dzinējam ir laiks atdzist. Piemērs: lifta piedziņa, elektriskie skuvekļi, matu žāvētāji.
- Motora tinumu pretestība. Motora tinumu pretestība ietekmē motora efektivitāti. Jo mazāka pretestība, jo augstāka efektivitāte. Izmērot pretestību, jūs varat noskaidrot, vai tinumā ir īssavienojums. Motora tinuma pretestība ir omu tūkstošdaļas. Lai to izmērītu, ir nepieciešama īpaša ierīce vai īpaša mērīšanas tehnika.
- Maksimālais darba spriegums. Maksimālais spriegums, ko var izturēt statora tinums. Maksimālais spriegums ir saistīts ar šādu parametru.
- Maksimālais ātrums. Dažreiz tie norāda nevis maksimālo ātrumu, bet gan Kv – dzinēja apgriezienu skaits uz voltu bez slodzes uz vārpstas. Reizinot šo indikatoru ar maksimālo spriegumu, mēs iegūstam maksimālo motora apgriezienu skaitu bez slodzes uz vārpstu.
- Maksimālā strāva. Maksimālā pieļaujamā tinuma strāva. Parasti tiek norādīts arī laiks, kurā motors var izturēt norādīto strāvu. Maksimālais strāvas ierobežojums ir saistīts ar iespējamu tinuma pārkaršanu. Tāpēc zemā apkārtējā temperatūrā faktiskais darbības laiks ar maksimālo strāvu būs garāks, un karstā laikā motors izdegs agrāk.
- Maksimālā dzinēja jauda. Tieši saistīts ar iepriekšējo parametru. Šī ir maksimālā jauda, ko dzinējs var radīt īsu laika periodu, parasti dažas sekundes. Ilgstoši darbojoties ar maksimālo jaudu, dzinēja pārkaršana un tā atteice ir neizbēgama.
- Nominālā jauda. Jauda, ko dzinējs var attīstīt visu laiku, kad tas ir ieslēgts.
- Fāzes virzīšanas leņķis (laiks). Statora tinumam ir zināma induktivitāte, kas palēnina strāvas pieaugumu tinumā. Pēc kāda laika strāva sasniegs maksimumu. Lai kompensētu šo aizkavi, fāzes pārslēgšana tiek veikta ar zināmu priekšu. Līdzīgi kā aizdedze iekšdedzes dzinējā, kur aizdedzes laiks tiek iestatīts, ņemot vērā degvielas aizdedzes laiku.
Jums arī jāpievērš uzmanība tam, ka pie nominālās slodzes jūs nesaņemsit maksimālo motora vārpstas ātrumu. Kv norādīts nenoslogotam dzinējam. Darbinot dzinēju no akumulatoriem, jārēķinās ar barošanas sprieguma “nokritumu” pie slodzes, kas savukārt samazinās arī maksimālo motora apgriezienu skaitu.
Viens no iemesliem, kāpēc dizaineri izrāda interesi par bezsuku elektromotoriem, ir nepieciešamība pēc ātrgaitas motoriem ar maziem izmēriem. Turklāt šiem dzinējiem ir ļoti precīza pozicionēšana. Dizainam ir kustīgs rotors un stacionārs stators. Rotors satur vienu pastāvīgo magnētu vai vairākus, kas atrodas noteiktā secībā. Statorā ir spoles, kas rada magnētisko lauku.
Jāatzīmē vēl viena iezīme - bezsuku elektromotoriem var būt armatūra, kas atrodas gan iekšpusē, gan ārpusē. Tāpēc abiem dizaina veidiem var būt īpašs pielietojums dažādās jomās. Armatūrai atrodoties iekšā, ir iespējams sasniegt ļoti lielu rotācijas ātrumu, tāpēc šādi motori ļoti labi darbojas dzesēšanas sistēmu projektēšanā. Ja ir uzstādīta piedziņa ar ārējo rotoru, var panākt ļoti precīzu pozicionēšanu, kā arī augstu izturību pret pārslodzēm. Ļoti bieži šādus motorus izmanto robotikā, medicīnas iekārtās un darbgaldos ar frekvences programmas vadību.
Kā darbojas motori
Lai darbinātu bezsuku līdzstrāvas motora rotoru, jāizmanto īpašs mikrokontrolleris. To nevar palaist tāpat kā sinhrono vai asinhrono mašīnu. Izmantojot mikrokontrolleri, ir iespējams ieslēgt motora tinumus tā, lai magnētiskā lauka vektoru virzieni uz statora un armatūras būtu ortogonāli.

Citiem vārdiem sakot, ar draivera palīdzību ir iespējams regulēt, kas iedarbojas uz bezsuku motora rotoru. Lai pārvietotu armatūru, statora tinumos ir jāveic pareiza komutācija. Diemžēl nav iespējams nodrošināt vienmērīgu rotācijas kontroli. Bet jūs varat ļoti ātri palielināt elektromotora rotoru.
Atšķirības starp suku un bezsuku motoriem
Galvenā atšķirība ir tā, ka bezsuku elektromotoriem modeļiem nav tinuma uz rotora. Komutatoru elektromotoru gadījumā uz to rotoriem ir tinumi. Bet pastāvīgie magnēti ir uzstādīti uz stacionārās motora daļas. Turklāt uz rotora ir uzstādīts īpaši izstrādāts kolektors, kuram pievienotas grafīta birstes. Ar to palīdzību rotora tinumam tiek piegādāts spriegums. Būtiski atšķiras arī bezsuku elektromotora darbības princips.
Kā darbojas kolektora mašīna?
Lai iedarbinātu komutatora motoru, lauka tinumam, kas atrodas tieši uz armatūras, būs jāpieliek spriegums. Tādā gadījumā veidojas pastāvīgs magnētiskais lauks, kas mijiedarbojas ar magnētiem uz statora, kā rezultātā griežas armatūra un tai pievienotais kolektors. Šajā gadījumā jauda tiek piegādāta nākamajam tinumam, un cikls atkārtojas.

Rotora griešanās ātrums ir tieši atkarīgs no magnētiskā lauka intensitātes, un pēdējais raksturlielums ir tieši atkarīgs no sprieguma lieluma. Tāpēc, lai palielinātu vai samazinātu griešanās ātrumu, ir jāmaina barošanas spriegums.
Lai īstenotu reversu, ir jāmaina tikai motora savienojuma polaritāte. Šādai vadībai nav nepieciešams izmantot īpašus mikrokontrollerus, jūs varat mainīt griešanās ātrumu, izmantojot parasto mainīgo rezistoru.
Bezsuku mašīnu īpašības
Bet bezsuku elektromotora vadība nav iespējama, neizmantojot īpašus kontrolierus. Pamatojoties uz to, mēs varam secināt, ka šāda veida motorus nevar izmantot kā ģeneratoru. Lai nodrošinātu vadības efektivitāti, rotora stāvokli var uzraudzīt, izmantojot vairākus Hall sensorus. Ar šādu vienkāršu ierīču palīdzību ir iespējams būtiski uzlabot veiktspēju, taču elektromotora izmaksas palielināsies vairākas reizes.
Bezsuku motoru palaišana

Nav jēgas pašiem taisīt mikrokontrollerus, daudz labāks risinājums būtu iegādāties gatavu, kaut arī ķīniešu. Bet, izvēloties, jums jāievēro šādi ieteikumi:
- Ievērojiet maksimālo pieļaujamo strāvu. Šis parametrs noteikti noderēs dažāda veida piedziņas darbībā. Raksturlielumu ražotāji bieži norāda tieši modeļa nosaukumā. Ļoti reti tiek norādītas pīķa režīmiem raksturīgās vērtības, kurās mikrokontrolleris nevar darboties ilgu laiku.
- Nepārtrauktai darbībai ir jāņem vērā maksimālais barošanas spriegums.
- Noteikti ņemiet vērā visu mikrokontrollera iekšējo ķēžu pretestību.
- Obligāti jāņem vērā maksimālais apgriezienu skaits, kas raksturīgs šī mikrokontrollera darbībai. Lūdzu, ņemiet vērā, ka tas nevarēs palielināt maksimālo ātrumu, jo ierobežojums tiek noteikts programmatūras līmenī.
- Lētajiem mikrokontrolleru ierīču modeļiem impulsi ir 7...8 kHz diapazonā. Dārgās kopijas var pārprogrammēt, un šis parametrs palielinās 2-4 reizes.
Mēģiniet izvēlēties mikrokontrollerus pēc visiem parametriem, jo tie ietekmē jaudu, ko var attīstīt elektromotors.
Kā tiek veikta vadība?
Elektroniskais vadības bloks ļauj pārslēgt piedziņas tinumus. Lai noteiktu pārslēgšanas momentu, vadītājs uzrauga rotora stāvokli, izmantojot piedziņā uzstādīto Hall sensoru.

Ja šādu ierīču nav, ir nepieciešams nolasīt reverso spriegumu. Tas tiek ģenerēts statora spoles, kas noteiktā laikā nav savienotas. Kontrolieris ir aparatūras un programmatūras komplekss, kas ļauj pārraudzīt visas izmaiņas un iestatīt pārslēgšanas secību pēc iespējas precīzāk.
Trīsfāzu bezsuku motori
Daudzi bezsuku elektromotori lidmašīnu modeļiem tiek darbināti ar līdzstrāvu. Bet ir arī trīsfāzu vienības, kurās ir uzstādīti pārveidotāji. Tie ļauj izgatavot trīsfāzu impulsus no tiešā sprieguma.

Darbs notiek šādi:
- Spole “A” saņem impulsus ar pozitīvu vērtību. Uz spoles "B" - ar negatīvu vērtību. Tā rezultātā enkurs sāks kustēties. Sensori fiksē pārvietojumu, un uz kontrolieri tiek nosūtīts signāls, lai veiktu nākamo pārslēgšanu.
- Spole “A” tiek izslēgta, un tinumam “C” tiek nosūtīts pozitīvs impulss. Tinuma "B" pārslēgšana nemainās.
- Pozitīvs impulss tiek nosūtīts uz spoli “C”, bet negatīvs impulss tiek nosūtīts uz “A”.
- Pēc tam sāk darboties pāris “A” un “B”. Viņiem attiecīgi tiek piegādātas pozitīvas negatīvas impulsa vērtības.
- Tad pozitīvais impulss atkal iet uz spoli “B”, bet negatīvais impulss uz “C”.
- Pēdējā posmā tiek ieslēgta spole “A”, uz kuru tiek saņemts pozitīvs impulss, un negatīvs tiek nosūtīts uz C.
Un pēc tam viss cikls atkārtojas.
Lietošanas priekšrocības

Ar savām rokām ir grūti izgatavot bezsuku elektromotoru, un mikrokontrollera vadības ieviešana ir gandrīz neiespējama. Tāpēc vislabāk ir izmantot gatavus rūpnieciskos dizainus. Bet noteikti ņemiet vērā priekšrocības, ko disks saņem, izmantojot bezsuku elektromotorus:
- Ievērojami ilgāks kalpošanas laiks nekā kolektoru mašīnām.
- Augsts efektivitātes līmenis.
- Jauda ir lielāka nekā kolektoru motoriem.
- Rotācijas ātrums palielinās daudz ātrāk.
- Darbības laikā nerodas dzirksteles, tāpēc tās var izmantot vidēs ar augstu ugunsbīstamību.
- Ļoti vienkārša diska darbība.
- Darbības laikā dzesēšanai nav jāizmanto papildu komponenti.
Starp trūkumiem var izcelt ļoti augstās izmaksas, ja ņemam vērā arī kontroliera cenu. Šādu elektromotoru pat uz īsu brīdi nevarēs ieslēgt, lai pārbaudītu tā funkcionalitāti. Turklāt šādu motoru remonts ir daudz grūtāks to konstrukcijas īpašību dēļ.
Šajā rakstā mēs vēlētos runāt par to, kā mēs izveidojām elektromotoru no nulles: no idejas un pirmā prototipa līdz pilnvērtīgam motoram, kas ir izturējis visus testus. Ja šis raksts jums šķiet interesants, mēs atsevišķi, sīkāk pastāstīsim par tiem mūsu darba posmiem, kas jūs visvairāk interesēja.
Attēlā no kreisās puses uz labo: rotors, stators, daļēja motora montāža, motora montāža
Ievads
Elektromotori parādījās pirms vairāk nekā 150 gadiem, taču šajā laikā to dizains nav piedzīvojis būtiskas izmaiņas: rotējošs rotors, vara statora tinumi, gultņi. Gadu gaitā ir bijis tikai elektromotoru svara samazinājums, efektivitātes pieaugums un arī ātruma kontroles precizitāte.Mūsdienās, pateicoties modernās elektronikas attīstībai un jaudīgu magnētu parādīšanās uz retzemju metālu bāzes, ir iespējams izveidot jaudīgākus un vienlaikus kompaktus un vieglus “Brushless” elektromotorus nekā jebkad agrāk. Tajā pašā laikā to dizaina vienkāršības dēļ tie ir uzticamākie jebkad radītie elektromotori. Šāda motora izveide tiks apspriesta šajā rakstā.
Motora apraksts
Bezsuku motoros nav elementa “Brushes”, kas visiem pazīstams no elektroinstrumentu izjaukšanas, kura uzdevums ir pārvadīt strāvu uz rotējošā rotora tinumu. Bezsuku motoros strāva tiek pievadīta nekustīga statora tinumiem, kas, radot pārmaiņus magnētisko lauku pie saviem atsevišķiem poliem, griež rotoru, uz kura piestiprināti magnēti.Pirmo šādu motoru mēs eksperimenta kārtā izdrukājām uz 3D printera. Speciālo plākšņu vietā, kas izgatavotas no elektrotērauda, rotora korpusam un statora serdenim izmantojām parasto plastmasu, uz kuras tika uztīta vara spole. Rotoram tika piestiprināti taisnstūra šķērsgriezuma neodīma magnēti. Protams, šāds motors nespēja nodrošināt maksimālu jaudu. Taču ar to pietika, lai motors grieztos līdz 20k apgr./min, pēc tam plastmasa neizturēja un motora rotors tika saplēsts, kā arī magnēti izkaisīti apkārt. Šis eksperiments mūs iedvesmoja izveidot pilnvērtīgu motoru.
Vairāki pirmie prototipi
Uzzinot radiovadāmo modeļu cienītāju viedokli, kā uzdevumu kā vispopulārāko izvēlējāmies motoru sacīkšu automašīnām ar izmēru “540”. Šī motora izmēri ir 54 mm garumā un 36 mm diametrā.
Jaunā motora rotoru izgatavojām no viena neodīma magnēta cilindra formā. Magnēts tika pielīmēts ar epoksīdu uz vārpstas, kas izgatavota no instrumenta tērauda izmēģinājuma ražotnē.

Mēs ar lāzeru izgriezām statoru no 0,5 mm biezu transformatora tērauda plākšņu komplekta. Pēc tam katra plāksne tika rūpīgi pārklāta ar laku un pēc tam gatavo statoru salīmēja kopā no aptuveni 50 plāksnēm. Plāksnes tika pārklātas ar laku, lai izvairītos no īssavienojumiem starp tām un novērstu enerģijas zudumus Fuko strāvu dēļ, kas varētu rasties statorā.

Motora korpuss bija izgatavots no divām alumīnija daļām konteinera formā. Stators cieši iekļaujas alumīnija korpusā un labi pieguļ sienām. Šis dizains nodrošina labu dzinēja dzesēšanu.

Raksturlielumu mērīšana
Lai sasniegtu savu dizainu maksimālu veiktspēju, ir nepieciešams veikt atbilstošu novērtēšanu un precīzu veiktspējas mērījumu. Šim nolūkam mēs izstrādājām un samontējām īpašu dinamīti.
Statīva galvenais elements ir liela slodze ripas formā. Mērījumu laikā motors griežas ar doto slodzi un no leņķiskā ātruma un paātrinājuma tiek aprēķināta motora izejas jauda un griezes moments.
Slodzes griešanās ātruma mērīšanai tiek izmantots magnētu pāris uz vārpstas un A3144 magnētiskais digitālais sensors, kura pamatā ir Hola efekts. Protams, būtu iespējams izmērīt apgriezienus ar impulsiem tieši no motora tinumiem, jo šis motors ir sinhrons. Taču opcija ar sensoru ir uzticamāka un darbosies pat pie ļoti maziem ātrumiem, pie kuriem impulsi būs nenolasāmi.
Papildus apgriezieniem mūsu stends spēj izmērīt vairākus citus svarīgus parametrus:
- barošanas strāva (līdz 30A), izmantojot strāvas sensoru, kura pamatā ir halles efekts ACS712;
- barošanas spriegums. Mērīts tieši caur mikrokontrollera ADC, caur sprieguma dalītāju;
- temperatūra motora iekšpusē/ārpusē. Temperatūru mēra, izmantojot pusvadītāju termisko pretestību;

Rezultātā mūsu stends jebkurā laikā spēj izmērīt šādus motora raksturlielumus:
- pašreizējais patēriņš;
- patērētais spriegums;
- elektrības patēriņš;
- izejas jauda;
- vārpstas apgriezieni;
- moments uz vārpstas;
- siltuma zuduma jauda;
- temperatūra motora iekšpusē.
Testa rezultāti
Lai pārbaudītu statīva veiktspēju, mēs vispirms to pārbaudījām ar parasto R540-6022 kolektora motoru. Šim motoram ir zināmi diezgan daudzi parametri, taču ar to pietika, lai novērtētu mērījumu rezultātus, kas izrādījās diezgan tuvi rūpnīcas rādītājiem.Pēc tam mūsu motors tika pārbaudīts. Protams, viņš spēja uzrādīt labāku efektivitāti (65% pret 45%) un tajā pašā laikā lielāku griezes momentu (1200 pret 250 g/cm) nekā parasts motors. Temperatūras mērījumi arī deva diezgan labus rezultātus testēšanas laikā, motors nesasildīja virs 80 grādiem.
Taču šobrīd mērījumi vēl nav galīgi. Mēs nevarējām izmērīt motoru visā tā apgriezienu diapazonā strāvas padeves ierobežojumu dēļ. Mums ir arī jāsalīdzina mūsu motors ar līdzīgiem konkurentu motoriem un jātestē “kaujā”, uzliekot to uz sacīkšu radiovadāmās mašīnas un uzstājoties sacensībās.
Šis ir maiņstrāvas elektromotora veids, kurā komutatora-birstes komplekts tiek aizstāts ar bezkontakta pusvadītāju slēdzi, ko kontrolē rotora pozīcijas sensors. Dažreiz jūs varat saskarties ar šādu saīsinājumu: BLDC - brushless DC motor. Vienkāršības labad es to saukšu par brushless motoru vai vienkārši BC.
Bezsuku motori ir diezgan populāri to specifikas dēļ: nav tādu palīgmateriālu kā birstes, iekšā nav oglekļa/metāla putekļu no berzes, nav dzirksteles (un šī ir milzīga vieta sprādzienbīstamām piedziņām/sūkņiem). Tos izmanto no ventilatoriem un sūkņiem līdz augstas precizitātes piedziņām.
Galvenais pielietojums modelēšanā un amatieru būvniecībā: motori radio vadāmiem modeļiem.
Šo motoru vispārīgā nozīme ir trīs fāzes un trīs tinumi (vai vairāki tinumi, kas savienoti trīs grupās), kurus kontrolē signāls sinusoīda vai aptuvenā sinusoīda veidā katrai no fāzēm, bet ar zināmu nobīdi. Attēlā parādīts vienkāršs trīsfāzu motora darbības attēls.
Attiecīgi viens no specifiskajiem BC motoru vadības aspektiem ir īpaša kontrollera-draivera izmantošana, kas ļauj regulēt strāvas un sprieguma impulsus katrai fāzei uz motora tinumiem, kas galu galā nodrošina stabilu darbību plašā sprieguma diapazonā. Tie ir tā sauktie ESC kontrolieri.
Tālvadības iekārtu BC motori ir dažāda izmēra un dizaina. Dažas no jaudīgākajām ir 22 mm, 36 mm un 40/42 mm sērijas. Pēc konstrukcijas tiem ir ārējais rotors un iekšējais (Outrunner, Inrunner). Motoriem ar ārējo rotoru faktiski nav statiska korpusa (jaka), un tie ir viegli. Parasti tos izmanto lidmašīnu modeļos, kvadrokopteros utt.
Motorus ar ārēju statoru ir vieglāk noblīvēt. Līdzīgi tiek izmantoti RC modeļiem, kas ir pakļauti ārējai ietekmei, piemēram, netīrumiem, putekļiem, mitrumam: bagijiem, monstriem, kāpurķēdēm, ūdens RC modeļiem).
Piemēram, 3660 tipa dzinēju var viegli uzstādīt attālā modeļa automašīnā, piemēram, bagijā vai briesmonī, un tas var radīt daudz prieka.
Atzīmēšu arī paša statora atšķirīgo izkārtojumu: 3660 motoriem ir 12 spoles, kas savienotas trīs grupās.
Tas ļauj iegūt lielu griezes momentu uz vārpstas. Tas izskatās apmēram šādi. 
Spoles ir savienotas šādi 
Ja izjaucat dzinēju un noņemat rotoru, varat redzēt statora spoles.
Lūk, kas atrodas 3660. sērijā 
vairāk fotogrāfiju 
Šādu liela griezes momenta dzinēju amatieru izmantošana ir paštaisītas konstrukcijas, kurām nepieciešams maza izmēra, jaudīgs ātrgaitas dzinējs. Tie var būt turbīnas tipa ventilatori, amatieru darbgaldu vārpstas utt.
Tātad, lai uzstādītu amatieru urbšanas un gravēšanas mašīnā, tika paņemts bezsuku motora komplekts kopā ar ESC kontrolieri.
GoolRC 3660 3800KV bezsuku motors ar ESC 60A metāla zobratu servo 9,0 kg komplektu
Komplekta priekšrocība bija 9 kg servo piedziņa, kas ir ļoti ērta mājās gatavotiem produktiem.
Vispārīgās prasības, izvēloties motoru, bija šādas:
- Apgriezienu skaits/volti vismaz 2000, jo bija paredzēts izmantot ar zemsprieguma avotiem (7,4...12V).
- Vārpstas diametrs 5mm. Apsvēru variantus ar 3,175 mm vārpstu (šī ir 24 diametra BC dzinēju sērija, piemēram, 2435), bet tad būtu jāpērk jauna ER11 kasetne. Ir vēl jaudīgāki varianti, piemēram, 4275 vai 4076 dzinēji, ar 5 mm vārpstu, taču tie attiecīgi ir dārgāki.
Bezsuku motora GoolRC 3660 īpašības:
Modelis: GoolRC 3660
Jauda: 1200W
Darba spriegums: līdz 13V
Strāvas ierobežojums: 92A
Apgriezieni uz voltu (RPM/Volt): 3800KV
Maksimālais ātrums: līdz 50 000
Korpusa diametrs: 36 mm
Korpusa garums: 60 mm
Vārpstas garums: 17 mm
Vārpstas diametrs: 5 mm
Komplekta skrūves izmērs: 6 gab * M3 (īsas, es izmantoju M3 * 6)
Savienotāji: 4 mm apzeltīts banānu tēviņš
Aizsardzība: no putekļiem un mitruma
ESC kontrollera īpašības:
Modelis: GoolRC ESC 60A
Nepārtrauktā strāva: 60A
Maksimālā strāva: 320A
Piemērojamie akumulatori: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V/3A
Savienotāji (ieeja): T spraudņa vīrs
Savienotāji (izeja): 4 mm apzeltīti banānu mātītes
Izmēri: 50 x 35 x 34 mm (izņemot kabeļa garumus)
Aizsardzība: no putekļiem un mitruma
Servo īpašības:
Darba spriegums: 6,0V-7,2V
Šūpošanās ātrums (6.0V): 0.16s/60° bez slodzes
Šūpošanās ātrums (7.2V): 0.14s/60° bez slodzes
Noturēšanas griezes moments (6.0V): 9.0kg.cm
Noturēšanas griezes moments (7.2V): 10.0kg.cm
Izmēri: 55 x 20 x 38 mm (G*G *G)
Komplekta parametri:
Iepakojuma izmērs: 10,5 x 8 x 6 cm
Iepakojuma svars: 390 g
Zīmola iepakojums ar GoolRC logotipu
Iestatīt saturu:
1 * GoolRC 3660 3800KV motors
1 * GoolRC 60A ESC
1 * GoolRC 9KG servo
1 * Informācijas lapa 
Izmēri atsaucei un GoolRC 3660 motora izskatam ar izcēlumiem 
Tagad daži vārdi par pašu paku.
Paciņa ieradās nelielas pasta pakas veidā ar kastīti iekšā 
Piegādā alternatīvs pasta pakalpojums, nevis Krievijas pasts, kā norādīts pavadzīmē 
Iepakojumā ir zīmola GoolRC kaste 
Iekšā ir bezsuku motora komplekts ar izmēru 3660 (36x60 mm), ESC kontrolieris tam un servo ar komplektu 
Tagad apskatīsim visu komplektu pa atsevišķiem komponentiem. Sāksim ar pašu svarīgāko – dzinēju.
GoolRC BC motors ir alumīnija cilindrs, kura izmēri ir 36x60 mm. Vienā pusē trīs resnas stieples silikona pinumā ar “banāniem”, otrā pusē 5 mm kāts. Rotors ir uzstādīts uz rites gultņiem abās pusēs. Uz korpusa ir modeļa marķējums 
Vēl viena fotogrāfija. Ārjaka ir fiksēta, t.i. Iekšējā motora tips. 
Marķējumi uz ķermeņa 
Gultnis ir redzams no aizmugures 
Tiek apgalvots, ka tas ir izturīgs pret šļakatām un mitrumu
Fāžu savienošanai iznāk trīs biezi, īsi vadi: u v w. Ja meklējat savienojuma spailes, tie ir 4 mm banāni 
Vadi ir termiski saraujami dažādās krāsās: dzeltenā, oranžā un zilā krāsā 
Motora izmēri: vārpstas diametrs un garums ir tāds pats kā norādīts: Vārpsta 5x17 mm 

Dzinēja korpusa izmēri 36x60 mm 

Salīdzinājums ar matētu 775 dzinēju 
Salīdzinājums ar 300 W lietotu vārpstu (un cena ir aptuveni 100 USD). Atgādināšu, ka GoolRC 3660 norādītā maksimālā jauda ir 1200 W. Pat ja jūs izmantojat trešdaļu jaudas, tas joprojām ir lētāks un vairāk nekā šī vārpsta 
Salīdzinājums ar citu modeļu dzinējiem 
Pareizai dzinēja darbībai jums būs nepieciešams īpašs ESC kontrolieris (kas ir iekļauts komplektā)
ESC kontrolieris ir motora draivera plate ar signāla pārveidotāju un jaudīgiem slēdžiem. Vienkāršos modeļos korpusa vietā izmanto siltuma saraušanos, jaudīgos modeļos tiek izmantots korpuss ar radiatoru un aktīvo dzesēšanu. 
Fotoattēlā redzams GoolRC ESC 60A kontrolieris salīdzinājumā ar tā “jaunāko” brāli ESC 20A 
Lūdzu, ņemiet vērā: uz stieples ir ieslēgšanas/izslēgšanas slēdzis, ko var iebūvēt ierīces/rotaļlietas korpusā. 
Ir pilns savienotāju komplekts: ieejas T-savienotāji, 4 mm banānu ligzdas, 3 kontaktu vadības signāla ieeja 
Jaudas banāni 4 mm - ligzdas, tiek apzīmēti līdzīgi pēc krāsas: dzeltena, oranža un zila. Savienojot, to var sajaukt tikai ar nolūku 
Ieejas T veida savienotāji. Tāpat jūs varat mainīt polaritāti, ja esat ļoti spēcīgs))))) 
Uz korpusa ir marķējums ar nosaukumu un īpašībām, kas ir ļoti ērti 
Dzesēšana ir aktīva, darbojas un tiek regulēta automātiski.
Lai novērtētu izmērus, esmu pievienojis PCB lineālu 
Komplektā ietilpst arī 9 kg GoolRC servo. 
Turklāt, tāpat kā ar jebkuru citu servo, komplektā ietilpst sviru komplekts (dubults, krusts, zvaigzne, ritenis) un montāžas aparatūra (man patika, ka ir starplikas, kas izgatavotas no misiņa) 
Servo vārpstas makro fotoattēls 
Mēģina nostiprināt krusta formas sviru fotografēšanai 
Patiesībā ir interesanti pārbaudīt norādītos raksturlielumus - tas ir metāla zobratu komplekts iekšpusē. Izjauksim servo. Korpuss atrodas uz hermētiķa lokā, un iekšpusē ir daudz eļļošanas. Zobrati patiešām ir no metāla. 
Servo vadības paneļa fotoattēls 
Kāpēc tas viss tika uzsākts: lai izmēģinātu BC dzinēju kā urbšanas/gravēšanas iekārtu. Tomēr norādītā maksimālā jauda ir 1200 W.
Es izvēlējos urbšanas preses projektu PCB sagatavošanai uz . Ir daudz projektu apgaismojuma galda stelles izgatavošanai. Parasti visi šie projekti ir mazi un paredzēti nelielam līdzstrāvas motoram. 
Es izvēlējos vienu no tiem un mainīju stiprinājumu 3660 dzinēja stiprinājumu ziņā (sākotnējais dzinējs bija mazāks un tam bija dažādi stiprinājuma izmēri)
Es sniedzu 3660 dzinēja sēdekļu rasējumu un izmērus 
Oriģinālam ir vājāks dzinējs. Šeit ir stiprinājuma skice (6 caurumi M3x6) 
Ekrānuzņēmums no programmas drukāšanai uz printeri 
Paralēli uzdruku arī skavu stiprināšanai virsū 
3660 motors ar uzstādītu ER11 spīļpatronu 

Lai pievienotu un pārbaudītu motoru BC, jums būs jāsamontē šāda ķēde: barošanas avots, servo testeris vai vadības panelis, ESC motora kontrolleris, motors.
Es izmantoju vienkāršāko servo testeri, tas arī dod vēlamo signālu. To var izmantot, lai ieslēgtu un regulētu dzinēja ātrumu 
Ja vēlaties, varat pievienot mikrokontrolleri (Arduino utt.). Sniedzu diagrammu no interneta ar outrunner un 30A kontroliera pieslēgumu. Skiču atrašana nav problēma. 
Mēs visu savienojam pēc krāsas. 
Avots rāda, ka kontrollera tukšgaitas strāva ir maza (0,26 A) 
Tagad urbjmašīna.
Mēs visu savācam un piestiprinām pie statīva 

Lai pārbaudītu montēju bez korpusa, tad izdrukāšu korpusu, kur var uzstādīt standarta slēdzi, servo testera kloķi 
Vēl viens līdzīga 3660 BC motora pielietojums ir kā vārpsta iespiedshēmu plates urbšanas un frēzēšanas mašīnām 


Pārskatu par pašu mašīnu pabeigšu nedaudz vēlāk. Būs interesanti pārbaudīt PCB gravēšanu, izmantojot GoolRC 3660
Secinājums
Dzinējs ir kvalitatīvs, jaudīgs, ar lielu griezes momentu, piemērots amatieru vajadzībām.
Laiks precīzi rādīs gultņu izturību zem sānu spēka frēzēšanas/gravēšanas laikā.
Modeļu motoru izmantošanai amatieru vajadzībām noteikti ir priekšrocības, kā arī viegla darbība un konstrukciju montāža uz tiem, salīdzinot ar CNC vārpstām, kas ir dārgākas un kurām nepieciešams īpašs aprīkojums (barošanas avoti ar ātruma kontroli, draiveri, dzesēšana utt. .).
Pasūtot izmantoju kuponu IZPĀRDOŠANA15 ar 5% atlaidi visām veikala precēm.
Paldies par jūsu uzmanību!
Plāno pirkt +61 Pievienot pie favorītiem Man patika apskats +92 +156Motori tiek izmantoti daudzās tehnoloģiju jomās. Lai motora rotors grieztos, jābūt rotējošam magnētiskajam laukam. Parastos līdzstrāvas motoros šī rotācija tiek veikta mehāniski, izmantojot birstes, kas slīd pa komutatoru. Šajā gadījumā rodas dzirksteles, un turklāt berzes un suku nodiluma dēļ šādiem motoriem nepieciešama pastāvīga apkope.
Pateicoties tehnoloģiju attīstībai, ir kļuvis iespējams elektroniski ģenerēt rotējošu magnētisko lauku, kas tika iemiesots bezsuku līdzstrāvas motoros (BLDC).
Ierīce un darbības princips
BDPT galvenie elementi ir:
- rotors, uz kura ir uzstādīti pastāvīgie magnēti;
- stators, uz kura ir uzstādīti tinumi;
- elektroniskais kontrolieris.
Pēc konstrukcijas šāds dzinējs var būt divu veidu:
ar iekšējo rotoru izvietojumu (ievada)

ar ārējo rotoru izvietojumu (ārējais)
Pirmajā gadījumā rotors griežas statora iekšpusē, bet otrajā - rotors ap statoru.
Inrunner tipa dzinējs izmanto, ja nepieciešams iegūt lielus griešanās ātrumus. Šim motoram ir vienkāršāka standarta konstrukcija, kas ļauj motora uzstādīšanai izmantot fiksētu statoru.
Outrunner tipa dzinējs Piemērots liela griezes momenta iegūšanai pie maziem apgriezieniem. Šajā gadījumā dzinējs ir uzstādīts, izmantojot fiksētu asi.
Inrunner tipa dzinējs- liels ātrums, zems griezes moments. Outrunner tipa dzinējs- mazs ātrums, liels griezes moments.
Polu skaits BLDC motorā var atšķirties. Pēc polu skaita var spriest par dažām motora īpašībām. Piemēram, motoram ar rotoru ar 2 poliem ir lielāks apgriezienu skaits un zems griezes moments. Motoriem ar palielinātu polu skaitu ir lielāks griezes moments, bet mazāk apgriezienu. Mainot rotora polu skaitu, var mainīt dzinēja apgriezienu skaitu. Tādējādi, mainot dzinēja konstrukciju, ražotājs var izvēlēties nepieciešamos dzinēja parametrus griezes momenta un apgriezienu skaita ziņā.
BDPT vadība

Ātruma regulators, izskats
Izmanto, lai vadītu bezsuku motoru īpašs kontrolieris - dzinēja vārpstas ātruma regulators līdzstrāva. Tās uzdevums ir ģenerēt un īstajā laikā piegādāt vajadzīgo spriegumu vajadzīgajam tinumam. Ar 220 V tīklu darbināmu ierīču kontrolieris visbiežāk izmanto invertora ķēdi, kurā strāva ar frekvenci 50 Hz vispirms tiek pārveidota līdzstrāvā un pēc tam signālos ar impulsa platuma modulāciju (PWM). Statora tinumu barošanas sprieguma nodrošināšanai tiek izmantoti jaudīgi elektroniskie slēdži uz bipolāriem tranzistoriem vai citiem jaudas elementiem.
Dzinēja jaudu un apgriezienus regulē, mainot impulsu darba ciklu un līdz ar to arī dzinēja statora tinumiem pievadītā sprieguma efektīvo vērtību.

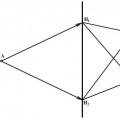
Ātruma regulatora shematiskā diagramma. K1-K6 - taustiņi D1-D3 - rotora pozīcijas sensori (Hall sensori)
Svarīgs jautājums ir savlaicīga elektronisko atslēgu pievienošana katram tinumam. Lai to nodrošinātu regulatoram jānosaka rotora pozīcija un tā ātrums. Lai iegūtu šādu informāciju, var izmantot optiskos vai magnētiskos sensorus (piemēram, Zāles sensori), kā arī reversos magnētiskos laukus.
Biežāka lietošana Zāles sensori, kas reaģēt uz magnētiskā lauka klātbūtni. Sensori ir novietoti uz statora tā, lai tos ietekmētu rotora magnētiskais lauks. Dažos gadījumos sensori tiek uzstādīti ierīcēs, kas ļauj mainīt sensoru novietojumu un attiecīgi pielāgot laiku.
Rotora ātruma regulatori ir ļoti jutīgi pret caur to plūstošās strāvas stiprumu. Ja izvēlaties uzlādējamu akumulatoru ar lielāku strāvas jaudu, regulators izdegs! Izvēlieties pareizo īpašību kombināciju!
Priekšrocības un trūkumi
Salīdzinot ar parastajiem BLDC motoriem, tiem ir šādas priekšrocības:
- augsta efektivitāte;
- augsta veiktspēja;
- iespēja mainīt griešanās ātrumu;
- nav dzirksteļojošu suku;
- nelieli trokšņi, gan audio, gan augstfrekvences diapazonā;
- uzticamība;
- spēja izturēt griezes momenta pārslodzi;
- izcili izmēru un jaudas attiecība.
Bezsuku motors ir ļoti efektīvs. Tas var sasniegt 93-95%.
BD mehāniskās daļas augstā uzticamība ir izskaidrojama ar to, ka tajā tiek izmantoti lodīšu gultņi un nav suku. Pastāvīgo magnētu demagnetizācija notiek diezgan lēni, īpaši, ja tie ir izgatavoti, izmantojot retzemju elementus. Lietojot strāvas aizsardzības kontrolierī, šīs ierīces kalpošanas laiks ir diezgan ilgs. Patiesībā BLDC motora kalpošanas laiku var noteikt pēc lodīšu gultņu kalpošanas laika.
BLDC trūkumi ir vadības sistēmas sarežģītība un augstās izmaksas.
Pieteikums
BDTP piemērošanas jomas ir šādas:
- modeļu veidošana;
- medicīna;
- automobiļu rūpniecība;
- Naftas un gāzes rūpniecība;
- Ierīces;
- militārais aprīkojums.
 Lietošana Lidmašīnu modeļu datu bāze nodrošina ievērojamas jaudas un izmēra priekšrocības. Salīdzinot parasto Speed-400 tipa kolektora motoru un tās pašas klases Astro Flight 020 BDTP, redzams, ka pirmā tipa motora efektivitāte ir 40-60%. Otrā dzinēja efektivitāte tādos pašos apstākļos var sasniegt 95%. Tādējādi datu bāzes izmantošana ļauj palielināt modeļa jaudas daļas jaudu vai tā lidojuma laiku gandrīz 2 reizes.
Lietošana Lidmašīnu modeļu datu bāze nodrošina ievērojamas jaudas un izmēra priekšrocības. Salīdzinot parasto Speed-400 tipa kolektora motoru un tās pašas klases Astro Flight 020 BDTP, redzams, ka pirmā tipa motora efektivitāte ir 40-60%. Otrā dzinēja efektivitāte tādos pašos apstākļos var sasniegt 95%. Tādējādi datu bāzes izmantošana ļauj palielināt modeļa jaudas daļas jaudu vai tā lidojuma laiku gandrīz 2 reizes.
Pateicoties zemam trokšņa līmenim un bez apkures darbības laikā, BLDC plaši izmanto medicīnā, īpaši zobārstniecībā.
Automašīnās šādi dzinēji tiek izmantoti logu pacēlāji, elektriskie vējstiklu tīrītāji, lukturu mazgātāji un elektriskie sēdekļu pacelšanas vadības elementi.
Nav komutatora vai otas dzirksteļošanasļauj izmantot datu bāzes kā bloķēšanas ierīču elementus naftas un gāzes rūpniecībā.
Kā piemēru BD izmantošanai sadzīves tehnikā var atzīmēt veļas mazgājamo mašīnu ar LG tiešo trumuļa piedziņu. Šis uzņēmums izmanto Outrunner tipa RDU. Uz motora rotora ir 12 magnēti, bet uz statora - 36 induktori, kas ir uztīti ar vadu ar 1 mm diametru uz serdeņiem, kas izgatavoti no magnētiski vadoša tērauda. Spoles ir savienotas virknē, 12 gabali katrā fāzē. Katras fāzes pretestība ir 12 omi. Hall sensors tiek izmantots kā rotora pozīcijas sensors. Motora rotors ir pievienots veļas mazgājamās mašīnas vannai.
 Šo dzinēju plaši izmanto datoru cietajos diskos, kas padara tos kompaktus, CD un DVD diskdziņos un mikroelektronisko ierīču dzesēšanas sistēmās un citur.
Šo dzinēju plaši izmanto datoru cietajos diskos, kas padara tos kompaktus, CD un DVD diskdziņos un mikroelektronisko ierīču dzesēšanas sistēmās un citur.
Līdzās mazas un vidējas jaudas BD, lieli BLDC motori arvien vairāk tiek izmantoti lieljaudas, jūras un militārajā rūpniecībā.
Lieljaudas datu bāzes ir izstrādātas ASV flotei. Piemēram, Powertec ir izstrādājis 220 kW BDHP ar ātrumu 2000 apgr./min. Dzinēja griezes moments sasniedz 1080 Nm.
Papildus šīm jomām DB tiek izmantotas darbgaldu, prešu, plastmasas apstrādes līniju projektos, kā arī vēja enerģijā un paisuma viļņu enerģijas izmantošanā.
Raksturlielumi
Galvenās dzinēja īpašības:
- nominālā jauda;
- maksimālā jauda;
- maksimālā strāva;
- maksimālais darba spriegums;
- maksimālais ātrums(vai Kv koeficients);
- tinumu pretestība;
- virziena leņķis;
- darbības režīms;
- kopējie izmēri un svara īpašības dzinējs.
Galvenais dzinēja rādītājs ir tā nominālā jauda, tas ir, jauda, ko dzinējs ģenerē ilgā darbības periodā.
 Maksimālā jauda- tā ir jauda, ko dzinējs var nodrošināt īsu laika periodu, nesabojājoties. Piemēram, iepriekš minētajam bezsuku motoram Astro Flight 020 tā ir 250 W.
Maksimālā jauda- tā ir jauda, ko dzinējs var nodrošināt īsu laika periodu, nesabojājoties. Piemēram, iepriekš minētajam bezsuku motoram Astro Flight 020 tā ir 250 W.
Maksimālā strāva. Astro Flight 020 tas ir 25 A.
Maksimālais darba spriegums– spriegums, ko var izturēt motora tinumi. Astro Flight 020 darba sprieguma diapazons ir iestatīts no 6 līdz 12 V.
Maksimālais dzinēja apgriezienu skaits. Dažreiz pasē ir norādīts Kv koeficients - motora apgriezienu skaits uz voltu. Astro lidojumam 020 Kv= 2567 r/V. Šajā gadījumā maksimālo ātrumu var noteikt, reizinot šo koeficientu ar maksimālo darba spriegumu.
Parasti tinumu pretestība dzinējiem ir desmitdaļas vai tūkstošdaļas no Ohm. Astro Flight 020 R= 0,07 Ohm. Šī pretestība ietekmē BLDC motora efektivitāti.
Virziena leņķis apzīmē pārslēgšanas spriegumu virzību uz tinumiem. Tas ir saistīts ar tinuma pretestības induktīvo raksturu.
Darbības režīms var būt ilgtermiņa vai īstermiņa. Ilgtermiņa režīmā dzinējs var darboties ilgu laiku. Tajā pašā laikā tā radītais siltums tiek pilnībā izkliedēts un tas nepārkarst. Motori darbojas šajā režīmā, piemēram, ventilatoros, konveijeros vai eskalatoros. Īstermiņa režīms tiek izmantots tādām ierīcēm kā lifts, elektriskais skuveklis. Šajos gadījumos dzinējs darbojas īsu laiku un pēc tam ilgstoši atdziest.
Dzinēja datu lapā ir norādīti tā izmēri un svars. Turklāt, piemēram, dzinējiem, kas paredzēti lidmašīnu modeļiem, ir norādīti nosēšanās izmēri un vārpstas diametrs. Jo īpaši Astro Flight 020 dzinējam ir norādīti šādi raksturlielumi:
- garums ir 1,75”;
- diametrs ir 0,98”;
- vārpstas diametrs ir 1/8”;
- svars ir 2,5 unces.
Secinājumi:
- Modelēšanā, dažādos tehniskos produktos, rūpniecībā un aizsardzības tehnoloģijās izmanto BLDC, kuros rotējošo magnētisko lauku ģenerē elektroniskā shēma.
- Pēc konstrukcijas BLDC motoriem var būt iekšējais (ievadošais) vai ārējais (ārējais) rotoru izvietojums.
- Salīdzinot ar citiem BLDC motoriem, tiem ir vairākas priekšrocības, no kurām galvenās ir suku un dzirksteļu trūkums, augsta efektivitāte un augsta uzticamība.