Nai-publish noong 04/11/2013
Nakabahaging Device (Inrunner, Outrunner)
Ang isang brushless DC motor ay binubuo ng isang rotor na may permanenteng magnet at isang stator na may windings. Mayroong dalawang uri ng mga makina: Inrunner, kung saan ang mga rotor magnet ay matatagpuan sa loob ng stator na may windings, at Outrunner, kung saan ang mga magnet ay matatagpuan sa labas at umiikot sa paligid ng isang nakatigil na stator na may mga paikot-ikot.

Scheme Inrunner kadalasang ginagamit para sa mga high-speed na motor na may maliit na bilang ng mga poste. Outrunner kung kinakailangan, kumuha ng high-torque engine na may medyo mababang bilis. Sa istruktura, ang mga Inrunner ay mas simple dahil sa katotohanan na ang isang nakatigil na stator ay maaaring magsilbi bilang isang pabahay. Maaaring i-mount dito ang mga fastening device. Sa kaso ng Outrunners, umiikot ang buong panlabas. Ang motor ay pinagtibay gamit ang isang nakapirming axis o mga bahagi ng stator. Sa kaso ng isang motor ng gulong, ang pag-mount ay isinasagawa sa nakapirming axis ng stator;

Magnet at pole
Ang bilang ng mga pole sa rotor ay pantay. Ang hugis ng mga magnet na ginamit ay karaniwang hugis-parihaba. Ang mga cylindrical magnet ay hindi gaanong ginagamit. Ang mga ito ay naka-install na may mga alternating pole.

Ang bilang ng mga magnet ay hindi palaging tumutugma sa bilang ng mga pole. Ang ilang mga magnet ay maaaring bumuo ng isang poste:

Sa kasong ito, 8 magneto ang bumubuo ng 4 na pole. Ang laki ng mga magnet ay depende sa geometry ng motor at sa mga katangian ng motor. Ang mas malakas na magnet na ginamit, mas mataas ang metalikang kuwintas na binuo ng motor sa baras.
Ang mga magnet sa rotor ay naayos gamit ang espesyal na pandikit. Ang mga disenyo na may magnet holder ay hindi gaanong karaniwan. Ang rotor material ay maaaring magnetically conductive (bakal), non-magnetically conductive (aluminum alloys, plastics, atbp.), o pinagsama.
Paikot-ikot at ngipin
Ang paikot-ikot ng isang three-phase brushless motor ay gawa sa tansong kawad. Ang wire ay maaaring single-core o binubuo ng ilang insulated wire. Ang stator ay gawa sa ilang mga sheet ng magnetically conductive steel na pinagsama-sama.

Ang bilang ng mga stator teeth ay dapat na hatiin sa bilang ng mga phase. mga. para sa three-phase brushless motor number ng stator teeth dapat nahahati sa 3. Ang bilang ng mga stator teeth ay maaaring mas malaki o mas mababa kaysa sa bilang ng mga pole sa rotor. Halimbawa, may mga motor na may mga sumusunod na scheme: 9 ngipin/12 magnet; 51 ngipin/46 magnet.

Ang mga motor na may 3-tooth stator ay bihirang ginagamit. Dahil dalawang phase lamang ang gumagana sa anumang oras (kapag naka-on ng isang bituin), ang mga magnetic force ay hindi kumikilos nang pantay-pantay sa rotor sa buong circumference (tingnan ang figure).

Ang mga puwersa na kumikilos sa rotor ay sinusubukang i-distort ito, na humahantong sa pagtaas ng vibration. Upang maalis ang epekto na ito, ang stator ay ginawa gamit ang isang malaking bilang ng mga ngipin, at ang paikot-ikot ay ipinamamahagi sa mga ngipin ng buong circumference ng stator nang pantay-pantay hangga't maaari.

Sa kasong ito, ang mga magnetic force na kumikilos sa rotor ay kanselahin ang isa't isa. Walang imbalance.

Mga opsyon para sa pamamahagi ng mga paikot-ikot na bahagi sa mga ngipin ng stator
9 na ngipin paikot-ikot na opsyon

12 ngipin paikot-ikot na opsyon

Sa mga diagram sa itaas, ang bilang ng mga ngipin ay pinili upang ito hindi lamang nahahati ng 3. Halimbawa, kapag 36 ngipin account para sa 12 ngipin sa bawat yugto. 12 ngipin ay maaaring ipamahagi tulad nito:




Ang pinaka-ginustong pamamaraan ay 6 na grupo ng 2 ngipin.
Umiiral motor na may 51 ngipin sa stator! 17 ngipin bawat yugto. Ang 17 ay isang pangunahing numero, ito ay ganap na mahahati lamang ng 1 at mismo. Paano ipamahagi ang paikot-ikot sa mga ngipin? Sa kasamaang palad, wala akong mahanap na mga halimbawa o pamamaraan sa panitikan na makakatulong sa paglutas ng problemang ito. Ito ay lumabas na ang paikot-ikot ay ibinahagi tulad ng sumusunod:

Isaalang-alang natin ang isang tunay na paikot-ikot na circuit.

Tandaan na ang paikot-ikot ay may iba't ibang direksyon ng paikot-ikot sa iba't ibang ngipin. Ang iba't ibang direksyon ng paikot-ikot ay ipinapahiwatig ng malalaking titik at malalaking titik. Maaari mong basahin nang detalyado ang tungkol sa disenyo ng mga windings sa panitikan na inaalok sa dulo ng artikulo.
Ang classic winding ay ginawa gamit ang isang wire para sa isang phase. Yung. lahat ng windings sa mga ngipin ng isang phase ay konektado sa serye.

Ang mga paikot-ikot ng mga ngipin ay maaari ding konektado sa parallel.

Maaaring mayroon ding pinagsamang mga inklusyon

Ang parallel at pinagsamang koneksyon ay ginagawang posible upang mabawasan ang paikot-ikot na inductance, na humahantong sa isang pagtaas sa kasalukuyang stator (at samakatuwid ay kapangyarihan) at bilis ng pag-ikot ng motor.
Electrical at tunay na bilis
Kung ang motor rotor ay may dalawang pole, pagkatapos ay may isang buong rebolusyon ng magnetic field sa stator, ang rotor ay gumagawa ng isang buong rebolusyon. Sa 4 na pole, ang pagpihit sa motor shaft ng isang buong rebolusyon ay nangangailangan ng dalawang rebolusyon ng magnetic field sa stator. Kung mas malaki ang bilang ng mga rotor pole, mas maraming mga electrical revolution na kinakailangan upang paikutin ang motor shaft bawat rebolusyon. Halimbawa, mayroon kaming 42 magnet sa rotor. Upang i-on ang rotor ng isang rebolusyon, 42/2 = 21 electrical revolution ang kinakailangan. Ang ari-arian na ito ay maaaring gamitin bilang isang uri ng reducer. Sa pamamagitan ng pagpili ng kinakailangang bilang ng mga pole, maaari kang makakuha ng isang motor na may nais na mga katangian ng bilis. Bilang karagdagan, kakailanganin namin ng pag-unawa sa prosesong ito sa hinaharap kapag pumipili ng mga parameter ng controller.
Mga sensor ng posisyon
Ang disenyo ng mga makina na walang mga sensor ay naiiba sa mga makina na may mga sensor lamang sa kawalan ng huli. Walang iba pang mga pangunahing pagkakaiba. Ang pinakakaraniwang mga sensor ng posisyon ay ang mga nakabatay sa epekto ng Hall. Ang mga sensor ay tumutugon sa isang magnetic field; Ang anggulo sa pagitan ng mga sensor ay dapat na 120 degrees.

Ito ay tumutukoy sa "electrical" degrees. Yung. para sa isang multi-pole motor, ang pisikal na pag-aayos ng mga sensor ay maaaring ang mga sumusunod:


Minsan ang mga sensor ay matatagpuan sa labas ng makina. Narito ang isang halimbawa ng lokasyon ng mga sensor. Ito ay talagang isang sensorless engine. Sa isang simpleng paraan ito ay nilagyan ng mga sensor ng hall.

Sa ilang mga makina, ang mga sensor ay naka-mount sa isang espesyal na aparato na nagpapahintulot sa mga sensor na ilipat sa loob ng ilang mga limitasyon. Gamit ang naturang device, ang anggulo ng timing ay nakatakda. Gayunpaman, kung ang makina ay nangangailangan ng reverse (pag-ikot sa tapat na direksyon) isang pangalawang set ng mga sensor na na-configure para sa reverse ay kinakailangan. Dahil ang timing ay hindi kritikal sa pagsisimula at mababang bilis, maaari mong itakda ang mga sensor sa zero point, at ayusin ang advance angle sa programmatically kapag nagsimulang umikot ang makina.
Mga pangunahing katangian ng engine
Ang bawat makina ay idinisenyo upang matugunan ang mga partikular na kinakailangan at may mga sumusunod na pangunahing katangian:
- Operating mode kung saan idinisenyo ang makina: pangmatagalan o panandaliang. Mahaba operating mode ay nangangahulugan na ang makina ay maaaring tumakbo nang maraming oras. Ang ganitong mga makina ay idinisenyo sa paraang ang paglipat ng init sa kapaligiran ay mas mataas kaysa sa paglabas ng init ng makina mismo. Sa kasong ito, hindi ito magpapainit. Halimbawa: bentilasyon, escalator o conveyor drive. Panandalian - ay nagpapahiwatig na ang makina ay bubuksan sa loob ng maikling panahon, kung saan hindi ito magkakaroon ng oras upang magpainit hanggang sa pinakamataas na temperatura, na sinusundan ng mahabang panahon, kung saan ang makina ay may oras upang palamig. Halimbawa: elevator drive, electric shaver, hair dryer.
- Motor winding resistance. Ang resistensya ng paikot-ikot ng motor ay nakakaapekto sa kahusayan ng motor. Kung mas mababa ang paglaban, mas mataas ang kahusayan. Sa pamamagitan ng pagsukat ng paglaban, maaari mong malaman ang pagkakaroon ng isang interturn short circuit sa paikot-ikot. Ang motor winding resistance ay thousandths ng isang ohm. Upang sukatin ito, kinakailangan ang isang espesyal na aparato o isang espesyal na pamamaraan ng pagsukat.
- Pinakamataas na operating boltahe. Ang maximum na boltahe na maaaring mapaglabanan ng stator winding. Ang pinakamataas na boltahe ay nauugnay sa sumusunod na parameter.
- Pinakamataas na bilis. Minsan hindi nila ipinapahiwatig ang maximum na bilis, ngunit Kv – ang bilang ng mga rebolusyon ng makina bawat bolta nang walang pagkarga sa baras. Ang pagpaparami ng tagapagpahiwatig na ito sa pinakamataas na boltahe, nakuha namin ang maximum na bilis ng engine nang walang pag-load sa baras.
- Pinakamataas na kasalukuyang. Pinakamataas na pinahihintulutang paikot-ikot na kasalukuyang. Bilang isang patakaran, ang oras kung saan ang motor ay maaaring makatiis sa tinukoy na kasalukuyang ay ipinahiwatig din. Ang maximum na kasalukuyang limitasyon ay nauugnay sa posibleng overheating ng winding. Samakatuwid, sa mababang temperatura ng kapaligiran, ang aktwal na oras ng pagpapatakbo na may pinakamataas na kasalukuyang ay magiging mas mahaba, at sa mainit na panahon ang motor ay masusunog nang mas maaga.
- Pinakamataas na lakas ng makina. Direktang nauugnay sa nakaraang parameter. Ito ang pinakamataas na lakas na kayang gawin ng makina sa loob ng maikling panahon, karaniwang ilang segundo. Kapag nagpapatakbo ng mahabang panahon sa pinakamataas na lakas, ang sobrang pag-init at pagkabigo ng makina ay hindi maiiwasan.
- Na-rate na kapangyarihan. Ang kapangyarihan na maaaring mabuo ng makina sa buong oras na ito ay naka-on.
- Phase advance angle (timing). Ang stator winding ay may ilang inductance, na nagpapabagal sa paglaki ng kasalukuyang sa winding. Ang kasalukuyang ay maaabot ang pinakamataas nito pagkatapos ng ilang oras. Upang mabayaran ang pagkaantala na ito, ang paglipat ng phase ay isinasagawa nang may kaunting pasulong. Katulad ng ignition sa isang internal combustion engine, kung saan itinakda ang timing ng ignition na isinasaalang-alang ang oras ng pag-aapoy ng gasolina.
Dapat mo ring bigyang pansin ang katotohanan na sa na-rate na pagkarga hindi ka makakakuha ng maximum na bilis sa baras ng motor. Kv ipinahiwatig para sa isang diskargado na makina. Kapag pinapagana ang makina mula sa mga baterya, dapat isaalang-alang ng isa ang "sag" ng supply boltahe sa ilalim ng pag-load, na kung saan ay bawasan din ang maximum na bilis ng engine.
Isa sa mga dahilan kung bakit nagpapakita ng interes ang mga designer sa mga brushless electric motor ay ang pangangailangan para sa mga high-speed na motor na may maliliit na sukat. Bukod dito, ang mga makinang ito ay may napakatumpak na pagpoposisyon. Ang disenyo ay may isang movable rotor at isang nakatigil na stator. Ang rotor ay naglalaman ng isang permanenteng magnet o ilang matatagpuan sa isang tiyak na pagkakasunud-sunod. Ang stator ay naglalaman ng mga coils na lumilikha ng magnetic field.
Isa pang tampok ang dapat pansinin - ang mga brushless electric motor ay maaaring magkaroon ng armature na matatagpuan sa loob at sa labas. Samakatuwid, ang dalawang uri ng disenyo ay maaaring may mga partikular na aplikasyon sa iba't ibang larangan. Kapag ang armature ay matatagpuan sa loob, posible na makamit ang isang napakataas na bilis ng pag-ikot, kaya ang mga naturang motor ay gumagana nang mahusay sa disenyo ng mga sistema ng paglamig. Kung ang isang drive na may panlabas na rotor ay naka-install, ang napaka-tumpak na pagpoposisyon ay maaaring makamit, pati na rin ang mataas na pagtutol sa mga overload. Kadalasan, ang mga naturang motor ay ginagamit sa mga robotics, medikal na kagamitan, at sa mga kagamitan sa makina na may kontrol sa dalas ng programa.
Paano gumagana ang mga motor
Upang mapatakbo ang rotor ng isang brushless DC motor, isang espesyal na microcontroller ang dapat gamitin. Hindi ito maaaring patakbuhin sa parehong paraan tulad ng isang synchronous o asynchronous na makina. Gamit ang isang microcontroller, posibleng i-on ang mga windings ng motor upang ang mga direksyon ng magnetic field vectors sa stator at armature ay orthogonal.

Sa madaling salita, sa tulong ng isang driver posible na i-regulate kung alin ang kumikilos sa rotor ng isang brushless motor. Upang ilipat ang armature, kinakailangan upang isagawa ang tamang commutation sa stator windings. Sa kasamaang palad, hindi posible na magbigay ng maayos na kontrol sa pag-ikot. Ngunit maaari mong napakabilis na taasan ang rotor ng de-koryenteng motor.
Mga pagkakaiba sa pagitan ng brushed at brushless motors
Ang pangunahing pagkakaiba ay na sa brushless electric motors para sa mga modelo ay walang paikot-ikot sa rotor. Sa kaso ng commutator electric motors, may mga windings sa kanilang mga rotors. Ngunit ang mga permanenteng magnet ay naka-install sa nakatigil na bahagi ng makina. Bilang karagdagan, ang isang espesyal na dinisenyo na kolektor ay naka-install sa rotor, kung saan ang mga graphite brush ay konektado. Sa kanilang tulong, ang boltahe ay ibinibigay sa rotor winding. Ang prinsipyo ng pagpapatakbo ng isang brushless electric motor ay malaki rin ang pagkakaiba.
Paano gumagana ang isang collector machine?
Upang magsimula ng isang commutator motor, kakailanganin mong ilapat ang boltahe sa paikot-ikot na field, na matatagpuan nang direkta sa armature. Sa kasong ito, nabuo ang isang pare-pareho na magnetic field, na nakikipag-ugnayan sa mga magnet sa stator, bilang isang resulta kung saan ang armature at ang kolektor na nakakabit dito ay umiikot. Sa kasong ito, ang kapangyarihan ay ibinibigay sa susunod na paikot-ikot, at ang pag-ikot ay umuulit.

Ang bilis ng pag-ikot ng rotor ay direktang nakasalalay sa kung gaano katindi ang magnetic field, at ang huling katangian ay direktang nakasalalay sa magnitude ng boltahe. Samakatuwid, upang madagdagan o bawasan ang bilis ng pag-ikot, kinakailangan na baguhin ang boltahe ng supply.
Upang ipatupad ang reverse, kailangan mo lamang baguhin ang polarity ng koneksyon ng motor. Para sa naturang kontrol, hindi mo kailangang gumamit ng mga espesyal na microcontroller; maaari mong baguhin ang bilis ng pag-ikot gamit ang isang regular na variable na risistor.
Mga tampok ng brushless machine
Ngunit ang pagkontrol sa isang brushless electric motor ay imposible nang walang paggamit ng mga espesyal na controller. Batay dito, maaari nating tapusin na ang mga motor ng ganitong uri ay hindi maaaring gamitin bilang isang generator. Para sa kahusayan ng kontrol, ang posisyon ng rotor ay maaaring subaybayan gamit ang maramihang mga sensor ng Hall. Sa tulong ng gayong mga simpleng aparato, posible na makabuluhang mapabuti ang pagganap, ngunit ang halaga ng de-koryenteng motor ay tataas nang maraming beses.
Pagsisimula ng mga motor na walang brush

Walang punto sa paggawa ng mga microcontroller sa iyong sarili; Ngunit dapat mong sundin ang mga sumusunod na rekomendasyon kapag pumipili:
- Obserbahan ang maximum na pinapayagang kasalukuyang. Tiyak na kapaki-pakinabang ang parameter na ito para sa iba't ibang uri ng pagpapatakbo ng drive. Ang katangian ay madalas na ipinahiwatig ng mga tagagawa nang direkta sa pangalan ng modelo. Napakabihirang, ang mga halaga na katangian ng mga peak mode ay ipinahiwatig, kung saan ang microcontroller ay hindi maaaring gumana nang mahabang panahon.
- Para sa patuloy na operasyon, kinakailangang isaalang-alang ang pinakamataas na boltahe ng supply.
- Siguraduhing isaalang-alang ang paglaban ng lahat ng mga panloob na circuit ng microcontroller.
- Kinakailangang isaalang-alang ang maximum na bilang ng mga rebolusyon na karaniwan para sa pagpapatakbo ng microcontroller na ito. Pakitandaan na hindi nito mapapalaki ang maximum na bilis, dahil ang limitasyon ay ginawa sa antas ng software.
- Ang mga murang modelo ng mga microcontroller device ay may mga pulso sa hanay na 7...8 kHz. Maaaring i-reprogram ang mga mamahaling kopya, at ang parameter na ito ay tumataas ng 2-4 na beses.
Subukang pumili ng mga microcontroller ayon sa lahat ng mga parameter, dahil nakakaapekto ang mga ito sa kapangyarihan na maaaring mabuo ng de-koryenteng motor.
Paano isinasagawa ang pamamahala?
Ang electronic control unit ay nagbibigay-daan para sa paglipat ng drive windings. Upang matukoy ang sandali ng paglipat, sinusubaybayan ng driver ang posisyon ng rotor gamit ang isang Hall sensor na naka-install sa drive.

Kung walang ganoong mga aparato, kinakailangang basahin ang reverse boltahe. Ito ay nabuo sa stator coils na hindi konektado sa isang naibigay na oras. Ang controller ay isang hardware at software complex, pinapayagan ka nitong subaybayan ang lahat ng mga pagbabago at itakda ang pagkakasunud-sunod ng paglipat nang tumpak hangga't maaari.
Three-phase brushless motors
Maraming brushless electric motor para sa mga modelo ng sasakyang panghimpapawid ay pinapagana ng DC current. Ngunit mayroon ding mga three-phase unit kung saan naka-install ang mga converter. Pinapayagan ka nitong gumawa ng mga three-phase pulses mula sa direktang boltahe.

Ang gawain ay nagpapatuloy tulad ng sumusunod:
- Ang Coil "A" ay tumatanggap ng mga pulso na may positibong halaga. Sa coil "B" - na may negatibong halaga. Bilang resulta nito, magsisimulang gumalaw ang anchor. Itinatala ng mga sensor ang displacement at isang signal ang ipinadala sa controller upang isagawa ang susunod na paglipat.
- Ang coil "A" ay naka-off, at isang positibong pulso ang ipinapadala sa paikot-ikot na "C". Ang paglipat ng paikot-ikot na "B" ay hindi nagbabago.
- Ang isang positibong pulso ay ipinadala sa coil "C", at isang negatibong pulso ay ipinapadala sa "A".
- Pagkatapos ay gagana ang pares na "A" at "B". Ang mga positibong negatibong halaga ng pulso ay ibinibigay sa kanila, ayon sa pagkakabanggit.
- Pagkatapos ang positibong pulso ay muling napupunta sa coil "B", at ang negatibong pulso sa "C".
- Sa huling yugto, ang coil na "A" ay naka-on, kung saan ang isang positibong salpok ay natanggap, at ang isang negatibo ay napupunta sa C.
At pagkatapos nito ay umuulit ang buong cycle.
Mga pakinabang ng paggamit

Mahirap gumawa ng brushless electric motor gamit ang iyong sariling mga kamay, at ang pagpapatupad ng kontrol ng microcontroller ay halos imposible. Samakatuwid, pinakamahusay na gumamit ng mga yari na disenyong pang-industriya. Ngunit siguraduhing isaalang-alang ang mga pakinabang na natatanggap ng drive kapag gumagamit ng mga brushless electric motor:
- Makabuluhang mas mahaba ang buhay ng serbisyo kaysa sa mga collector machine.
- Mataas na antas ng kahusayan.
- Ang kapangyarihan ay mas mataas kaysa sa commutator motors.
- Ang bilis ng pag-ikot ay tumataas nang mas mabilis.
- Walang nabubuong spark sa panahon ng operasyon, kaya magagamit ang mga ito sa mga kapaligirang may mataas na panganib sa sunog.
- Napakasimpleng operasyon ng drive.
- Sa panahon ng operasyon ay hindi na kailangang gumamit ng mga karagdagang bahagi para sa paglamig.
Kabilang sa mga disadvantages, maaari nating i-highlight ang napakataas na gastos, kung isasaalang-alang din natin ang presyo ng controller. Hindi posible na i-on ang naturang de-koryenteng motor kahit na sandali upang suriin ang pag-andar nito. Bilang karagdagan, ang pag-aayos ng mga naturang motor ay mas mahirap dahil sa kanilang mga tampok sa disenyo.
Sa artikulong ito nais naming pag-usapan kung paano kami lumikha ng isang de-koryenteng motor mula sa simula: mula sa ideya at ang unang prototype hanggang sa isang ganap na motor na nakapasa sa lahat ng mga pagsubok. Kung nakita mong kawili-wili ang artikulong ito, hiwalay naming sasabihin sa iyo nang mas detalyado ang tungkol sa mga yugto ng aming trabaho na pinaka-interesado sa iyo.
Sa larawan mula kaliwa hanggang kanan: rotor, stator, partial motor assembly, motor assembly
Panimula
Ang mga de-koryenteng motor ay lumitaw higit sa 150 taon na ang nakalilipas, ngunit sa panahong ito ang kanilang disenyo ay hindi sumailalim sa anumang mga makabuluhang pagbabago: isang umiikot na rotor, mga paikot-ikot na stator ng tanso, mga bearings. Sa paglipas ng mga taon, nagkaroon lamang ng pagbawas sa bigat ng mga de-koryenteng motor, pagtaas ng kahusayan, at gayundin sa katumpakan ng kontrol ng bilis.Ngayon, salamat sa pag-unlad ng modernong electronics at ang paglitaw ng mga makapangyarihang magnet batay sa mga bihirang metal na lupa, posible na lumikha ng mas malakas at sa parehong oras na compact at magaan na "Brushless" na mga de-koryenteng motor kaysa sa dati. Kasabay nito, dahil sa pagiging simple ng kanilang disenyo, sila ang pinaka-maaasahang electric motor na nilikha kailanman. Ang paglikha ng naturang motor ay tatalakayin sa artikulong ito.
Paglalarawan ng motor
Ang "Brushless motors" ay walang elementong "Brushes", pamilyar sa lahat mula sa pag-disassembling ng mga power tool, na ang tungkulin ay magpadala ng kasalukuyang sa paikot-ikot ng umiikot na rotor. Sa mga motor na walang brush, ang kasalukuyang ay ibinibigay sa mga windings ng isang hindi gumagalaw na stator, na, sa pamamagitan ng paglikha ng isang magnetic field na halili sa mga indibidwal na pole nito, ay umiikot sa rotor kung saan ang mga magnet ay nakakabit.Ang unang naturang motor ay na-print namin sa isang 3D printer bilang isang eksperimento. Sa halip na mga espesyal na plato na gawa sa de-koryenteng bakal, gumamit kami ng ordinaryong plastik para sa rotor housing at stator core, kung saan nasugatan ang copper coil. Ang mga neodymium magnet ng rectangular cross-section ay nakakabit sa rotor. Naturally, ang naturang motor ay hindi kayang maghatid ng pinakamataas na kapangyarihan. Gayunpaman, ito ay sapat na para sa motor na umiikot hanggang sa 20k rpm, pagkatapos nito ay hindi makayanan ng plastik at ang rotor ng motor ay napunit, at ang mga magnet ay nakakalat sa paligid. Ang eksperimentong ito ay nagbigay inspirasyon sa amin na lumikha ng isang ganap na motor.
Ilang mga unang prototype
Ang pagkakaroon ng natutunan ang opinyon ng mga tagahanga ng mga modelo na kinokontrol ng radyo, bilang isang gawain, pinili namin ang isang motor para sa mga karera ng kotse na may sukat na "540", bilang ang pinakasikat. Ang motor na ito ay may sukat na 54mm ang haba at 36mm ang lapad.
Ginawa namin ang rotor ng bagong motor mula sa isang neodymium magnet sa hugis ng isang silindro. Ang magnet ay nakadikit ng epoxy sa isang baras na ginawa mula sa tool steel sa isang pasilidad ng produksyon ng piloto.

Pinutol namin ng laser ang stator mula sa isang hanay ng mga plate na bakal ng transpormer na 0.5 mm ang kapal. Ang bawat plato ay pagkatapos ay maingat na pinahiran ng barnis at pagkatapos ay ang natapos na stator ay pinagsama-sama mula sa mga 50 na plato. Ang mga plato ay pinahiran ng barnis upang maiwasan ang mga maikling circuit sa pagitan ng mga ito at upang maalis ang pagkawala ng enerhiya dahil sa mga alon ng Foucault na maaaring lumabas sa stator.

Ang pabahay ng motor ay gawa sa dalawang bahagi ng aluminyo sa hugis ng isang lalagyan. Ang stator ay magkasya nang mahigpit sa aluminyo na pabahay at mahusay na umaangkop sa mga dingding. Tinitiyak ng disenyong ito ang mahusay na paglamig ng makina.

Pagsusukat ng pagganap
Upang makamit ang pinakamataas na pagganap ng iyong mga disenyo, kinakailangan na magsagawa ng sapat na pagsusuri at tumpak na pagsukat ng pagganap. Para sa layuning ito, kami ay nagdisenyo at nag-assemble ng isang espesyal na dyno.
Ang pangunahing elemento ng stand ay isang mabigat na pagkarga sa anyo ng isang pak. Sa panahon ng mga pagsukat, ang motor ay umiikot sa ibinigay na load at ang output power at torque ng motor ay kinakalkula mula sa angular velocity at acceleration.
Upang sukatin ang bilis ng pag-ikot ng load, ginagamit ang isang pares ng magnet sa shaft at isang A3144 magnetic digital sensor batay sa Hall effect. Siyempre, posibleng sukatin ang mga rebolusyon sa pamamagitan ng mga pulso nang direkta mula sa mga windings ng motor, dahil ang motor na ito ay kasabay. Gayunpaman, ang opsyon na may sensor ay mas maaasahan at gagana ito kahit na sa napakababang bilis, kung saan ang mga pulso ay hindi nababasa.
Bilang karagdagan sa mga rebolusyon, ang aming paninindigan ay may kakayahang sukatin ang ilang iba pang mahahalagang parameter:
- supply ng kasalukuyang (hanggang 30A) gamit ang isang kasalukuyang sensor batay sa hall effect ACS712;
- supply ng boltahe. Direktang sinusukat sa pamamagitan ng ADC ng microcontroller, sa pamamagitan ng isang divider ng boltahe;
- temperatura sa loob/labas ng motor. Ang temperatura ay sinusukat gamit ang isang semiconductor thermal resistance;

Bilang resulta, ang aming stand ay may kakayahang sukatin ang mga sumusunod na katangian ng motor anumang oras:
- kasalukuyang pagkonsumo;
- natupok na boltahe;
- konsumo sa enerhiya;
- kapangyarihan ng output;
- mga rebolusyon ng baras;
- sandali sa baras;
- nawala ang kapangyarihan sa init;
- temperatura sa loob ng motor.
Mga resulta ng pagsubok
Upang suriin ang pagganap ng stand, sinubukan muna namin ito sa isang maginoo na R540-6022 commutator motor. Ang ilang mga parameter ay kilala para sa motor na ito, ngunit ito ay sapat na upang suriin ang mga resulta ng pagsukat, na naging medyo malapit sa mga pabrika.Tapos na-test yung motor namin. Naturally, naipakita niya ang mas mahusay na kahusayan (65% kumpara sa 45%) at sa parehong oras mas malaking metalikang kuwintas (1200 kumpara sa 250 g bawat cm) kaysa sa isang maginoo na motor. Ang mga sukat ng temperatura ay nagbigay din ng medyo magandang resulta sa panahon ng pagsubok, ang motor ay hindi uminit sa itaas ng 80 degrees.
Ngunit sa ngayon ang mga sukat ay hindi pa pinal. Hindi namin nagawang sukatin ang motor sa buong saklaw ng rpm nito dahil sa mga limitasyon ng power supply. Kailangan din nating ihambing ang ating motor sa mga katulad na motor mula sa mga kakumpitensya at subukan ito "sa labanan", ilagay ito sa isang racing radio-controlled na kotse at gumaganap sa mga kumpetisyon.
Ito ay isang uri ng AC electric motor kung saan ang commutator-brush assembly ay pinapalitan ng isang contactless semiconductor switch na kinokontrol ng isang rotor position sensor. Minsan maaari mong makita ang sumusunod na pagdadaglat: BLDC - brushless DC motor. Para sa pagiging simple, tatawagin ko itong brushless motor o simpleng BC.
Ang mga motor na walang brush ay medyo sikat dahil sa kanilang pagiging tiyak: walang mga consumable tulad ng mga brush, walang carbon/metal dust sa loob mula sa friction, walang sparks (at ito ay isang malaking lugar para sa pagsabog at fire-safe drive/pump). Ginagamit ang mga ito mula sa mga fan at pump hanggang sa mga high-precision drive.
Pangunahing aplikasyon sa pagmomodelo at amateur construction: mga motor para sa mga modelong kontrolado ng radyo.
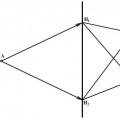
Ang pangkalahatang kahulugan ng mga motor na ito ay tatlong phase at tatlong windings (o ilang windings na konektado sa tatlong grupo), na kinokontrol ng isang signal sa anyo ng isang sinusoid o isang tinatayang sinusoid para sa bawat isa sa mga phase, ngunit may ilang shift. Ang figure ay nagpapakita ng isang simpleng paglalarawan ng pagpapatakbo ng isang three-phase motor.
Alinsunod dito, ang isa sa mga tiyak na aspeto ng pagkontrol sa mga motor ng BC ay ang paggamit ng isang espesyal na controller-driver, na nagbibigay-daan sa iyo upang ayusin ang kasalukuyang at boltahe na mga pulso para sa bawat yugto sa mga windings ng motor, na sa huli ay nagbibigay ng matatag na operasyon sa isang malawak na hanay ng boltahe. Ito ang mga tinatawag na ESC controllers.
Ang mga BC motor para sa remote control na kagamitan ay may iba't ibang laki at disenyo. Ang ilan sa mga pinakamakapangyarihan ay ang 22 mm, 36 mm at 40/42 mm series. Sa pamamagitan ng disenyo, mayroon silang panlabas na rotor at panloob (Outrunner, Inrunner). Ang mga motor na may panlabas na rotor sa katunayan ay walang static na pabahay (jacket) at magaan ang timbang. Bilang isang patakaran, ginagamit ang mga ito sa mga modelo ng sasakyang panghimpapawid, quadcopter, atbp.
Ang mga motor na may panlabas na stator ay mas madaling i-seal. Ang mga katulad ay ginagamit para sa mga modelo ng RC na nakalantad sa mga panlabas na impluwensya gaya ng dumi, alikabok, kahalumigmigan: mga buggies, halimaw, crawler, water RC model).
Halimbawa, ang isang 3660 type na makina ay madaling mai-install sa isang malayuang modelong kotse tulad ng isang buggy o halimaw at nakakakuha ng maraming kasiyahan.
Mapapansin ko rin ang iba't ibang layout ng stator mismo: 3660 motors ay may 12 coils na konektado sa tatlong grupo.
Pinapayagan ka nitong makakuha ng mataas na metalikang kuwintas sa baras. Parang ganito. 
Ang mga coils ay konektado tulad nito 
Kung i-disassemble mo ang makina at alisin ang rotor, makikita mo ang stator coils.
Narito kung ano ang nasa loob ng 3660 series 
higit pang mga larawan 
Ang amateur na paggamit ng mga naturang high-torque na makina ay nasa mga disenyong gawa sa bahay na nangangailangan ng maliit, makapangyarihan, mataas na bilis ng makina. Ang mga ito ay maaaring mga turbine-type na fan, mga spindle ng amateur machine tool, atbp.
Kaya, para sa layunin ng pag-install sa isang amateur machine para sa pagbabarena at pag-ukit, isang set ng brushless motor ang kinuha kasama ng isang ESC controller
GoolRC 3660 3800KV Brushless Motor na may ESC 60A Metal Gear Servo 9.0kg Set
Ang bentahe ng kit ay isang 9 kg na servo drive, na napaka-maginhawa para sa mga produktong gawa sa bahay.
Ang mga pangkalahatang kinakailangan kapag pumipili ng motor ay ang mga sumusunod:
- Ang bilang ng mga revolutions/volts ay hindi bababa sa 2000, dahil ito ay binalak na gamitin ito sa mababang boltahe na pinagmumulan (7.4...12V).
- Shaft diameter 5mm. Isinaalang-alang ko ang mga opsyon na may 3.175 mm shaft (ito ay isang serye ng 24 diameter BC engine, halimbawa, 2435), ngunit pagkatapos ay kailangan kong bumili ng bagong ER11 cartridge. Mayroong mas malakas na mga pagpipilian, halimbawa, 4275 o 4076 na mga makina, na may 5 mm na baras, ngunit ang mga ito ay katumbas na mas mahal.
Mga katangian ng GoolRC 3660 brushless motor:
Modelo: GoolRC 3660
Kapangyarihan: 1200W
Operating boltahe: hanggang 13V
Kasalukuyang limitasyon: 92A
Mga rebolusyon bawat bolta (RPM/Volt): 3800KV
Pinakamataas na bilis: hanggang 50000
Diametro ng kaso: 36mm
Haba ng kaso: 60mm
Haba ng baras: 17mm
diameter ng baras: 5mm
Itakda ang laki ng turnilyo: 6 na pcs * M3 (maikli, ginamit ko ang M3 * 6)
Mga Konektor: 4mm gold-plated na saging na lalaki
Proteksyon: mula sa alikabok at kahalumigmigan
Mga katangian ng ESC controller:
Modelo: GoolRC ESC 60A
Patuloy na kasalukuyang: 60A
Pinakamataas na kasalukuyang: 320A
Mga naaangkop na baterya: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V/3A
Mga Konektor (Input): T plug na lalaki
Mga Konektor (output): 4mm na gintong saging na babae
Mga Dimensyon: 50 x 35 x 34mm (hindi kasama ang mga haba ng cable)
Proteksyon: mula sa alikabok at kahalumigmigan
Mga katangian ng servo:
Boltahe sa pagpapatakbo: 6.0V-7.2V
Bilis ng swing (6.0V): 0.16sec/60° walang load
Bilis ng swing (7.2V): 0.14sec/60° walang load
Holding torque (6.0V): 9.0kg.cm
Holding torque (7.2V): 10.0kg.cm
Mga Dimensyon: 55 x 20 x 38mm (L * W * H)
Mga parameter ng kit:
Laki ng package: 10.5 x 8 x 6 cm
Timbang ng package: 390 g
Branded packaging na may logo ng GoolRC
Itakda ang mga nilalaman:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Impormasyon sheet 
Mga sukat para sa sanggunian at hitsura ng GoolRC 3660 motor na may mga highlight 
Ngayon ng ilang mga salita tungkol sa parsela mismo.
Dumating ang parsela sa anyo ng isang maliit na pakete ng koreo na may kahon sa loob 
Inihahatid ng alternatibong serbisyo sa koreo, hindi Russian Post, na sinasabi ng bill of lading 
Ang package ay naglalaman ng isang branded na GoolRC box 
Sa loob ay isang set ng brushless motor size 3660 (36x60 mm), isang ESC controller para dito at isang servo na may kit. 
Ngayon tingnan natin ang buong hanay ng mga indibidwal na bahagi. Magsimula tayo sa pinakamahalagang bagay - ang makina.
Ang GoolRC BC motor ay isang aluminum cylinder, mga sukat na 36 by 60 mm. Sa isang gilid mayroong tatlong makapal na wire sa isang silicone braid na may "saging", sa kabilang panig ay may 5 mm shaft. Ang rotor ay naka-mount sa mga rolling bearings sa magkabilang panig. Mayroong isang pagmamarka ng modelo sa kaso 
Ibang larawan. Ang panlabas na dyaket ay naayos, i.e. Inrunner na uri ng motor. 
Mga marka sa katawan 
Ang tindig ay makikita mula sa hulihan 
Sinasabing lumalaban sa splash at moisture
Tatlong makapal at maiikling wire ang lumabas para ikonekta ang mga phase: u v w. Kung naghahanap ka ng mga terminal para sa koneksyon, ito ay 4 mm na saging 
Ang mga wire ay heat-shrinkable sa iba't ibang kulay: dilaw, orange at asul 
Mga sukat ng motor: ang diameter at haba ng shaft ay pareho sa nakasaad: Shaft 5x17 mm 

Mga sukat ng pabahay ng engine 36x60 mm 

Paghahambing sa brushed 775 engine 
Paghahambing sa isang 300W na ginamit na spindle (at isang presyo na humigit-kumulang $100). Ipaalala ko sa iyo na ang GoolRC 3660 ay may nakasaad na peak power na 1200W. Kahit na gumamit ka ng isang ikatlong bahagi ng kapangyarihan, ito ay mas mura at higit pa sa spindle na ito 
Paghahambing sa iba pang modelo ng makina 
Para sa tamang operasyon ng makina kakailanganin mo ng isang espesyal na ESC controller (na kasama sa kit)
Ang ESC controller ay isang motor driver board na may signal converter at malalakas na switch. Sa mga simpleng modelo, ginagamit ang heat shrink sa halip na isang pabahay; sa mga makapangyarihang modelo, ginagamit ang isang pabahay na may radiator at aktibong paglamig. 
Ang larawan ay nagpapakita ng GoolRC ESC 60A controller kumpara sa "nakababatang" kapatid nito na ESC 20A 
Pakitandaan: may on/off switch sa isang piraso ng wire na maaaring ilagay sa katawan ng device/laruan 
Mayroong isang buong hanay ng mga konektor: input T-connectors, 4 mm banana jacks, 3-pin control signal input 
Power bananas 4 mm - sockets, ay minarkahan ng katulad ng kulay: dilaw, orange at asul. Kapag kumokonekta, maaari mo lamang itong ihalo nang sinasadya 
Mga T-konektor ng input. Katulad nito, maaari mong baligtarin ang polarity kung ikaw ay napakalakas))))) 
Mayroong pagmamarka sa kaso na may pangalan at mga katangian, na napaka-maginhawa 
Ang paglamig ay aktibo, gumagana at awtomatikong kinokontrol.
Upang matantya ang mga sukat na ikinabit ko ng isang PCB ruller 
Kasama rin sa set ang isang 9 kg na GoolRC servo. 
Dagdag pa, tulad ng para sa anumang iba pang servo, ang kit ay may kasamang isang set ng mga lever (double, cross, star, wheel) at mounting hardware (nagustuhan ko na may mga spacer na gawa sa tanso) 
Macro na larawan ng isang servo shaft 
Sinusubukang i-secure ang isang hugis-cross na pingga para sa pagkuha ng litrato 
Talagang kawili-wiling suriin ang nakasaad na mga pagtutukoy - ito ay isang metal na hanay ng mga gear sa loob. I-disassemble natin ang servo. Ang katawan ay nakaupo sa sealant sa isang bilog, at mayroong maraming pagpapadulas sa loob. Ang mga gear ay talagang metal. 
Larawan ng servo control board 
Bakit nagsimula ang lahat ng ito: upang subukan ang BC engine bilang isang drilling/engraving machine. Gayunpaman, ang nakasaad na peak power ay 1200W.
Pinili ko ang isang drill press project para sa paghahanda ng mga PCB sa . Mayroong maraming mga proyekto out doon para sa paggawa ng isang lighting table loom. Karaniwan, ang lahat ng mga proyektong ito ay maliit at idinisenyo upang mapaunlakan ang isang maliit na DC motor. 
Pinili ko ang isa sa mga ito at binago ang mount sa mga tuntunin ng mga mount para sa 3660 engine (ang orihinal na makina ay mas maliit at may iba't ibang laki ng mount)
Nagbibigay ako ng drawing ng mga upuan at sukat ng 3660 engine 
Ang orihinal ay may mas mahinang makina. Narito ang isang sketch ng pangkabit (6 na butas para sa M3x6) 
Screenshot mula sa isang programa para sa pag-print sa isang printer 
Kasabay nito ay nag-print din ako ng clamp para sa pag-mount sa itaas 
3660 motor na may naka-install na ER11 collet chuck 

Upang ikonekta at suriin ang motor BC, kakailanganin mong i-assemble ang sumusunod na circuit: power supply, servo tester o control board, ESC motor controller, motor.
Ginagamit ko ang pinakasimpleng servo tester, nagbibigay din ito ng nais na signal. Maaari itong magamit upang i-on at ayusin ang bilis ng engine 
Kung ninanais, maaari mong ikonekta ang isang microcontroller (Arduino, atbp.). Nagbibigay ako ng diagram mula sa Internet na may koneksyon ng isang outrunner at isang 30A controller. Ang paghahanap ng mga sketch ay hindi isang problema. 
Ikinonekta namin ang lahat sa pamamagitan ng kulay. 
Ipinapakita ng source na ang idle current ng controller ay maliit (0.26A) 
Ngayon ang drilling machine.
Kinokolekta namin ang lahat at ilakip ito sa rack 

Upang suriin, tipunin ko ito nang walang pabahay, pagkatapos ay i-print ko ang pabahay, kung saan maaari kang mag-install ng isang karaniwang switch, isang servo tester knob 
Ang isa pang aplikasyon ng isang katulad na 3660 BC na motor ay bilang isang suliran para sa mga makina para sa pagbabarena at paggiling ng mga naka-print na circuit board. 


Tatapusin ko ang pagsusuri tungkol sa makina mismo sa ibang pagkakataon. Magiging interesante na tingnan ang pag-ukit ng PCB gamit ang GoolRC 3660
Konklusyon
Ang makina ay may mataas na kalidad, malakas, na may maraming metalikang kuwintas, na angkop para sa mga layunin ng amateur.
Eksaktong sasabihin ng oras ang survivability ng mga bearings sa ilalim ng lateral force sa panahon ng milling/engraving.
Mayroong tiyak na mga benepisyo sa paggamit ng mga modelo ng motor para sa mga layunin ng amateur, pati na rin ang kadalian ng pagpapatakbo at pagpupulong ng mga istruktura sa kanila kumpara sa mga spindle ng CNC, na mas mahal at nangangailangan ng mga espesyal na kagamitan (mga power supply na may kontrol sa bilis, mga driver, paglamig, atbp. .).
Gumamit ako ng isang kupon kapag nag-order SALE15 na may 5% na diskwento sa lahat ng mga produkto ng tindahan.
Salamat sa iyong atensyon!
Balak kong bumili ng +61 Idagdag sa mga Paborito Nagustuhan ko ang pagsusuri +92 +156Ginagamit ang mga motor sa maraming larangan ng teknolohiya. Upang ang rotor ng motor ay umiikot, isang umiikot na magnetic field ay dapat na naroroon. Sa mga kumbensyonal na DC motor, ang pag-ikot na ito ay ginagawa nang mekanikal gamit ang mga brush na dumudulas sa isang commutator. Sa kasong ito, nangyayari ang sparking, at, bilang karagdagan, dahil sa alitan at pagsusuot ng mga brush, ang mga naturang motor ay nangangailangan ng patuloy na pagpapanatili.
Salamat sa pag-unlad ng teknolohiya, naging posible na makabuo ng isang umiikot na magnetic field sa elektronikong paraan, na nakapaloob sa brushless direct current motors (BLDC).
Device at prinsipyo ng pagpapatakbo
Ang mga pangunahing elemento ng BDPT ay:
- rotor, kung saan naka-mount ang mga permanenteng magnet;
- stator, kung saan naka-install ang mga windings;
- elektronikong controller.
Sa pamamagitan ng disenyo, ang naturang makina ay maaaring may dalawang uri:
na may panloob na rotor arrangement (inrunner)

na may panlabas na rotor arrangement (outrunner)
Sa unang kaso, ang rotor ay umiikot sa loob ng stator, at sa pangalawa, ang rotor ay umiikot sa paligid ng stator.
Inrunner type na makina ginagamit kapag kinakailangan upang makakuha ng mataas na bilis ng pag-ikot. Ang motor na ito ay may mas simpleng karaniwang disenyo na nagpapahintulot sa paggamit ng isang nakapirming stator upang i-mount ang motor.
Outrunner type na makina Angkop para sa pagkuha ng mataas na metalikang kuwintas sa mababang bilis. Sa kasong ito, ang makina ay naka-mount gamit ang isang nakapirming axis.
Inrunner type na makina- mataas na bilis, mababang metalikang kuwintas. Outrunner type na makina- mababang bilis, mataas na metalikang kuwintas.
Maaaring mag-iba ang bilang ng mga poste sa isang BLDC motor. Sa pamamagitan ng bilang ng mga pole maaaring hatulan ng isa ang ilang mga katangian ng motor. Halimbawa, ang isang motor na may rotor na mayroong 2 pole ay may mas mataas na bilang ng mga rebolusyon at mababang torque. Ang mga motor na may tumaas na bilang ng mga poste ay may mas maraming metalikang kuwintas, ngunit mas kaunting mga rebolusyon. Sa pamamagitan ng pagpapalit ng bilang ng mga rotor pole, maaari mong baguhin ang bilis ng makina. Kaya, sa pamamagitan ng pagbabago ng disenyo ng engine, maaaring piliin ng tagagawa ang mga kinakailangang parameter ng engine sa mga tuntunin ng metalikang kuwintas at bilis.
Kontrol ng BDPT

Speed controller, hitsura
Ginagamit upang kontrolin ang isang brushless motor espesyal na controller - engine shaft speed regulator direktang kasalukuyang. Ang gawain nito ay upang makabuo at magbigay ng kinakailangang boltahe sa nais na paikot-ikot sa tamang oras. Ang controller para sa mga device na pinapagana ng isang 220 V network ay kadalasang gumagamit ng isang inverter circuit, kung saan ang kasalukuyang na may dalas na 50 Hz ay unang na-convert sa direktang kasalukuyang, at pagkatapos ay sa mga signal na may pulse width modulation (PWM). Upang matustusan ang boltahe ng supply sa mga windings ng stator, ginagamit ang mga makapangyarihang electronic switch sa bipolar transistors o iba pang mga elemento ng kuryente.
Ang kapangyarihan at bilis ng makina ay nababagay sa pamamagitan ng pagbabago ng duty cycle ng mga pulso, at, dahil dito, sa pamamagitan ng epektibong halaga ng boltahe na ibinibigay sa stator windings ng engine.

Schematic diagram ng speed controller. K1-K6 - mga susi D1-D3 - mga sensor ng posisyon ng rotor (Mga sensor ng Hall)
Ang isang mahalagang isyu ay ang napapanahong koneksyon ng mga electronic key sa bawat paikot-ikot. Para masigurado ito dapat matukoy ng controller ang posisyon ng rotor at ang bilis nito. Upang makakuha ng ganoong impormasyon, maaaring gamitin ang mga optical o magnetic sensor (halimbawa, Mga sensor ng hall), pati na rin ang mga reverse magnetic field.
Mas karaniwang paggamit Mga sensor ng hall, na reaksyon sa pagkakaroon ng isang magnetic field. Ang mga sensor ay inilalagay sa stator sa paraang apektado sila ng magnetic field ng rotor. Sa ilang mga kaso, ang mga sensor ay naka-install sa mga device na nagbibigay-daan sa iyong baguhin ang posisyon ng mga sensor at, nang naaayon, ayusin ang timing.
Ang mga rotor speed controller ay napaka-sensitibo sa lakas ng kasalukuyang dumadaan dito. Kung pipili ka ng rechargeable na baterya na may mas mataas na kasalukuyang output, ang regulator ay mapapaso! Piliin ang tamang kumbinasyon ng mga katangian!
Mga kalamangan at kahinaan
Kung ikukumpara sa maginoo na BLDC motors, mayroon silang mga sumusunod na pakinabang:
- mataas na kahusayan;
- mataas na pagganap;
- posibilidad ng pagbabago ng bilis ng pag-ikot;
- walang sparking brushes;
- maliliit na ingay, parehong nasa mga hanay ng audio at mataas na dalas;
- pagiging maaasahan;
- kakayahang makatiis ng labis na karga ng metalikang kuwintas;
- mahusay ratio ng mga sukat at kapangyarihan.
Ang brushless motor ay lubos na mahusay. Maaari itong umabot sa 93-95%.
Ang mataas na pagiging maaasahan ng mekanikal na bahagi ng BD ay ipinaliwanag sa pamamagitan ng ang katunayan na ito ay gumagamit ng ball bearings at walang mga brush. Ang demagnetization ng mga permanenteng magnet ay nangyayari nang medyo mabagal, lalo na kung ang mga ito ay ginawa gamit ang mga bihirang elemento ng lupa. Kapag ginamit sa isang kasalukuyang controller ng proteksyon, ang buhay ng serbisyo ng yunit na ito ay medyo mahaba. Sa totoo lang Ang buhay ng serbisyo ng BLDC motor ay maaaring matukoy sa pamamagitan ng buhay ng serbisyo ng mga ball bearings.
Ang mga disadvantages ng BLDC ay ang pagiging kumplikado ng control system at mataas na gastos.
Aplikasyon
Ang mga lugar ng aplikasyon ng BDTP ay ang mga sumusunod:
- paglikha ng mga modelo;
- gamot;
- industriya ng sasakyan;
- Industriya ng langis at gas;
- Mga gamit;
- kagamitang militar.
 Paggamit Database para sa mga modelo ng sasakyang panghimpapawid nagbibigay ng malaking kalamangan sa kapangyarihan at laki. Ang paghahambing ng isang maginoo na commutator motor ng Speed-400 na uri at isang Astro Flight 020 BDTP ng parehong klase ay nagpapakita na ang unang uri ng motor ay may kahusayan na 40-60%. Ang kahusayan ng pangalawang engine sa ilalim ng parehong mga kondisyon ay maaaring umabot sa 95%. Kaya, ang paggamit ng isang database ay ginagawang posible upang madagdagan ang kapangyarihan ng bahagi ng kapangyarihan ng modelo o ang oras ng paglipad nito ng halos 2 beses.
Paggamit Database para sa mga modelo ng sasakyang panghimpapawid nagbibigay ng malaking kalamangan sa kapangyarihan at laki. Ang paghahambing ng isang maginoo na commutator motor ng Speed-400 na uri at isang Astro Flight 020 BDTP ng parehong klase ay nagpapakita na ang unang uri ng motor ay may kahusayan na 40-60%. Ang kahusayan ng pangalawang engine sa ilalim ng parehong mga kondisyon ay maaaring umabot sa 95%. Kaya, ang paggamit ng isang database ay ginagawang posible upang madagdagan ang kapangyarihan ng bahagi ng kapangyarihan ng modelo o ang oras ng paglipad nito ng halos 2 beses.
Dahil sa mababang ingay at walang pag-init sa panahon ng operasyon, ang mga BLDC ay malawakang ginagamit sa medisina, lalo na sa dentistry.
Sa mga kotse, ang mga naturang makina ay ginagamit sa window lift, electric windshield wiper, headlight washer at electric seat lift controls.
Walang commutator o brush sparking nagbibigay-daan sa paggamit ng mga database bilang mga elemento ng locking device sa industriya ng langis at gas.
Bilang halimbawa ng paggamit ng BD sa mga gamit sa sambahayan, mapapansin natin ang washing machine na may direktang drum drive mula sa LG. Gumagamit ang kumpanyang ito ng Outrunner type RDU. Mayroong 12 magneto sa rotor ng motor, at 36 na inductors sa stator, na sugat ng wire na may diameter na 1 mm sa mga core na gawa sa magnetically conductive steel. Ang mga coils ay konektado sa serye, 12 piraso bawat yugto. Ang paglaban ng bawat yugto ay 12 ohms. Ang isang Hall sensor ay ginagamit bilang isang rotor position sensor. Ang motor rotor ay nakakabit sa washing machine tub.
 Ang makinang ito ay malawakang ginagamit sa mga hard drive para sa mga computer, na ginagawang compact ang mga ito, sa mga CD at DVD drive at mga cooling system para sa mga micro-electronic na device at higit pa.
Ang makinang ito ay malawakang ginagamit sa mga hard drive para sa mga computer, na ginagawang compact ang mga ito, sa mga CD at DVD drive at mga cooling system para sa mga micro-electronic na device at higit pa.
Kasama ng maliliit at katamtamang kapangyarihan na mga BD, ang malalaking BLDC na motor ay lalong ginagamit sa mabibigat na tungkulin, marine at militar na industriya.
Ang mga high-power database ay binuo para sa US Navy. Halimbawa, nakabuo ang Powertec ng 220 kW BDHP na may bilis na 2000 rpm. Ang engine torque ay umabot sa 1080 Nm.
Bilang karagdagan sa mga lugar na ito, ang mga DB ay ginagamit sa mga proyekto ng mga kagamitan sa makina, pagpindot, mga linya ng pagpoproseso ng plastik, gayundin sa enerhiya ng hangin at paggamit ng enerhiya ng tidal wave.
Mga katangian
Mga pangunahing katangian ng engine:
- na-rate na kapangyarihan;
- pinakamataas na kapangyarihan;
- pinakamataas na kasalukuyang;
- maximum na operating boltahe;
- pinakamataas na bilis(o Kv koepisyent);
- paikot-ikot na pagtutol;
- pasulong anggulo;
- operating mode;
- pangkalahatang sukat at mga katangian ng timbang makina.
Ang pangunahing tagapagpahiwatig ng isang makina ay ang na-rate na kapangyarihan nito, iyon ay, ang kapangyarihan na nabuo ng makina sa loob ng mahabang panahon ng operasyon.
 Pinakamataas na kapangyarihan- ito ang kapangyarihan na maihahatid ng makina sa loob ng maikling panahon nang hindi nasisira. Halimbawa, para sa Astro Flight 020 brushless motor na binanggit sa itaas, ito ay 250 W.
Pinakamataas na kapangyarihan- ito ang kapangyarihan na maihahatid ng makina sa loob ng maikling panahon nang hindi nasisira. Halimbawa, para sa Astro Flight 020 brushless motor na binanggit sa itaas, ito ay 250 W.
Pinakamataas na kasalukuyang. Para sa Astro Flight 020 ito ay 25 A.
Pinakamataas na operating boltahe– boltahe na kayang tiisin ng mga windings ng motor. Para sa Astro Flight 020, ang operating voltage range ay nakatakda mula 6 hanggang 12 V.
Pinakamataas na bilis ng engine. Minsan ang pasaporte ay nagpapahiwatig ng Kv coefficient - ang bilang ng mga revolutions ng engine bawat bolta. Para sa Astro Flight 020 Kv= 2567 r/V. Sa kasong ito, ang maximum na bilis ay maaaring matukoy sa pamamagitan ng pagpaparami ng koepisyent na ito sa maximum na operating boltahe.
Karaniwan paikot-ikot na pagtutol para sa mga makina ay tenths o thousandths ng isang Ohm. Para sa Astro Flight 020 R= 0.07 Ohm. Ang paglaban na ito ay nakakaapekto sa kahusayan ng BLDC motor.
Pasulong na anggulo kumakatawan sa pagsulong ng paglipat ng mga boltahe sa mga paikot-ikot. Ito ay nauugnay sa inductive na katangian ng paikot-ikot na paglaban.
Ang operating mode ay maaaring pangmatagalan o panandalian. Sa pangmatagalang mode, ang makina ay maaaring tumakbo nang mahabang panahon. Kasabay nito, ang init na nabuo nito ay ganap na nawawala at hindi ito nag-iinit. Gumagana ang mga motor sa mode na ito, halimbawa, sa mga fan, conveyor o escalator. Ginagamit ang panandaliang mode para sa mga device gaya ng elevator, electric razor. Sa mga kasong ito, ang makina ay tumatakbo nang maikling panahon at pagkatapos ay lumalamig nang mahabang panahon.
Ipinapakita ng sheet ng data ng engine ang mga sukat at timbang nito. Bilang karagdagan, halimbawa, para sa mga makina na inilaan para sa modelo ng sasakyang panghimpapawid, ang mga sukat ng landing at diameter ng baras ay ibinibigay. Sa partikular, ang mga sumusunod na katangian ay ibinigay para sa Astro Flight 020 engine:
- ang haba ay 1.75";
- diameter ay 0.98";
- ang diameter ng baras ay 1/8";
- ang timbang ay 2.5 onsa.
Mga konklusyon:
- Sa pagmomodelo, sa iba't ibang mga teknikal na produkto, sa industriya at sa teknolohiya ng pagtatanggol, ginagamit ang mga BLDC, kung saan ang isang umiikot na magnetic field ay nabuo ng isang electronic circuit.
- Sa pamamagitan ng disenyo, ang mga BLDC motor ay maaaring magkaroon ng panloob (inrunner) o panlabas (outrunner) rotor arrangement.
- Kung ikukumpara sa iba pang BLDC motors, mayroon silang isang bilang ng mga pakinabang, ang mga pangunahing ay ang kawalan ng mga brush at sparking, mataas na kahusayan at mataas na pagiging maaasahan.