1. Strukturna analiza mehanizam
1.1 Određivanje stepena pokretljivosti mehanizma
Gdje N= 3 — broj pokretnih dijelova mehanizma
— broj kinematičkih parova pete klase
— broj kinematičkih parova četvrte klase
U datom mehanizmu postoje četiri para pete klase
Rotacioni parovi
3.0 translacijski parovi
Nema parova četvrtog razreda
1.2 Određivanje klase mehanizma
Da bismo to učinili, dijelimo mehanizam u grupe Assur.
Definiramo Assur grupu druge klase koju čine veze 2 i 3. Vodeća karika ostaje, formirajući mehanizam prve klase.
Mehanizam klase I Mehanizam klase II
Narudžba 2
Formula za strukturu mehanizma
I (0,1) II (2,3)
Klasa vezne grupe je druga, stoga mehanizam koji se razmatra pripada drugoj klasi.
2 Geometrijska sinteza mehanizma
2.1 Crtanje mehanizma u ekstremnim položajima
2.2 Odredite linearne dimenzije radilice i klipnjače
Brzina okretanja ručice n1= 82 o/min
Hod klizača S = 0,575 m
Odnos dužine poluge i dužine klipnjače
Odnos ekscentriciteta i dužine poluge
2.3 Tokom jednog obrtaja ručice s;
Klizač će preći put S, na S=2AB
Odredite dužinu veze;
Odredite dužinu veze;
Određujemo položaj tačke M na linku AB iz relacije
; INM=0,18×1,15 = 0,207 m;
3 Izrada plana mehanizma radilice
Da bismo konstruirali plan kliznog mehanizma radilice, nacrtamo krug polumjera AB, a zatim nacrtamo horizontalnu liniju AC. Podijelimo krugove na 12 dijelova (za 12 položaja mehanizma). Zatim stavljamo segmente B0C0, B1C1 ... B11C11 na horizontalni AC. Povezujemo centar kružnice A sa tačkama B0, B1 ... B11. Na svakoj od 12 pozicija poluge iscrtavamo segment VMi (gdje je i broj pozicije poluge). Spajanjem tačaka M0, M1 ... M11 dobijamo putanju tačke M.
4 Određivanje brzina tačaka O, A, B, M za četiri pozicije.
Pozicija 1:
Odredite brzinu tačke B
Hajde da razmotrimo
Odrediti iz trougla ABC
Hajde da razmotrimo
RS određujemo kroz
Kroz određujemo AR
Definiranje VR
Mi definišemo Ð J
Određivanje MR
Određujemo brzine tačaka A, C i M iz formule
Mi definišemo
provjerimo:
Pozicija 2:
Odredite brzinu tačke B
Hajde da razmotrimo
Koristeći zakon sinusa određujemo:
Odrediti iz trougla OAB
Koristeći zakon sinusa određujemo AC
Hajde da razmotrimo
RS određujemo kroz
Kroz određujemo AR
Definiranje VR
Mi definišemo Ð J
Hajde da definišemo MR
Mi definišemo Ð Y
provjerimo:
Pozicija 3:
Kako su brzine VB, VC i VM paralelne i tačke B, C i M ne mogu ležati na istoj okomiti na pravac ovih brzina, u trenutku kada trenutno središte brzina klipnjače BC leži u beskonačnosti, njegov ugaona brzina, i čini trenutni pokret naprijed. Stoga, u ovom trenutku:
Pozicija 4:
Odredite brzinu tačke B
Hajde da razmotrimo
Koristeći zakon sinusa određujemo:
Mi definišemo Ð B iz trougla ABC
Koristeći zakon sinusa određujemo AC
Hajde da razmotrimo
RS određujemo kroz
Kroz određujemo AR
Hajde da razmotrimo
Definiranje VR
Mi definišemo Ð J
Hajde da definišemo MR
Određujemo brzine tačaka A, B i M iz formule
Mi definišemo Ð Y
provjerimo:
5. Konstrukcija dijagrama pomaka, brzina i ubrzanja.
Neka je potrebno konstruirati kinematički dijagram udaljenosti, brzina i ubrzanja klizača C koljenasto-kliznog mehanizma. Radilica AB dužine l=0,29m se okreće konstantnom ugaonom brzinom n1=82rpm.
ručica- klizni mehanizam služi za transformaciju rotaciono kretanje na prevod i obrnuto. Sastoji se od ležaja 1, radilice 2, klipnjače 3 i klizača 4.
Ručica vrši rotacijski pokret, klipnjača pravi paralelno kretanje, a klizač vrši povratno kretanje.
Dva tijela koja su međusobno povezana pokretno formiraju kinematički par. Tijela koja čine par nazivaju se karike. Obično je preciziran zakon kretanja pogonske karike (radilice). Kinematički dijagrami se konstruišu unutar jednog perioda (ciklusa), stacionarnog kretanja za nekoliko pozicija pogonske karike.
Gradimo na skali u dvanaest pozicija, što odgovara uzastopnim okretajima ručice na svakih 300.
Gdje je S = 2r stvarna vrijednost hoda klizača, jednaka dvostrukoj vrijednosti poluge.
— hod klizača na dijagramu mehanizma.
Odakle dolazi vremenska skala?
Segment 1 na vremenskoj osi će biti podijeljen na 12 jednakih dijelova koji odgovaraju, na odabranoj skali, rotaciji poluge pod uglovima: 300, 600, 900, 1200, 1500, 1800, 2100, 2400, 2700, 300 , 3600 (u tačkama 1-12). Nacrtajmo vertikalne segmente iz ovih tačaka: 1-1S = V0V1, 2-2S = V0V2, itd. Do krajnje desne pozicije klizača B, ove udaljenosti se povećavaju, a počevši od pozicije B one se smanjuju. Ako se tačke 0s, 1s, 2s ... 12s spoje u seriju sa krivom, dobiće se dijagram pomaka tačke B.
Za izradu dijagrama brzina i ubrzanja koristi se metoda grafičke diferencijacije. Dijagram brzina je konstruiran na sljedeći način.
Ispod dijagrama pomaka ucrtavamo koordinate v i t, a na nastavku v ose lijevo je proizvoljno iscrtana odabrana polova udaljenost HV=20mm.
Iz tačke Pv povlačimo prave linije paralelne sa tangentima krive S, redom, u tačkama 0s, 1s, 2s ... 12s. Ove prave linije odsijecaju segmente na V osi: 0-0v, 0-1v, 0-2v..., proporcionalno brzinama u odgovarajućim tačkama dijagrama. Pomeramo tačke na ordinate odgovarajućih tačaka. Niz dobijenih tačaka 0v, 1v, 2v... povezujemo glatkom krivom, koja je dijagram brzina. Vremenska skala ostaje ista, skala brzine:
Dijagram ubrzanja konstruiramo slično dijagramu brzina. Skala ubrzanja
Gdje je Ha=16mm odabrana udaljenost polova za dijagram ubrzanja.
Kako su brzina i ubrzanje 1. i 2. izvod pomaka u odnosu na vrijeme, ali u odnosu na gornji dijagram, donja je diferencijalna kriva, a u odnosu na donju gornja je integralna kriva. Dakle, dijagram brzine za dijagram pomaka je diferencijal. Prilikom konstruiranja kinematičkih dijagrama za verifikaciju, trebali biste koristiti svojstva derivacije:
— rastući graf pomaka (brzina) odgovara pozitivnim vrijednostima grafa brzine (jednadžbe), a opadajući odgovara negativnim vrijednostima;
— maksimalne i minimalne tačke, tj. ekstremna vrijednost grafa pomaka (brzine) odgovara nultim vrijednostima grafikona brzine (ubrzanja);
— tačka savijanja grafika pomaka (brzine) odgovara ekstremnim vrijednostima grafikona brzine (ubrzanja);
— tačka savijanja na dijagramu pomaka odgovara tački u kojoj je ubrzanje nula;
- ordinate početka i kraja perioda bilo kojeg kinematičkog dijagrama su jednake, a tangente povučene u tim tačkama su paralelne.
Za crtanje kretanja klizača B biramo koordinatne ose s, t. Na osi apscise iscrtavamo segment l=120mm, prikazujući vrijeme T jednog puni okret ručica
Napravili smo geometrijski proračun karika mehanizma radilica-klizač, odredili dužine poluge i klizača i utvrdili njihov odnos. Izračunali smo mehanizam radilice u četiri položaja i odredili brzine tačaka koristeći trenutni centar brzina za četiri položaja. Konstruirali smo dijagrame pomaka, brzina i ubrzanja. Utvrđeno je da postoji greška zbog konstrukcije i zaokruživanja u proračunima.
Pošaljite svoj dobar rad u bazu znanja je jednostavno. Koristite obrazac ispod
Studenti, postdiplomci, mladi naučnici koji koriste bazu znanja u svom studiranju i radu biće vam veoma zahvalni.
Objavljeno na Allbest.ru
Uvod
2.1.1 Označavanje mehanizma
2.1.2 Proračun brzina
2.1.3 Proračun ubrzanja
Zaključak
Uvod
Teorija mehanizama rješava probleme strukture, kinematike i dinamike mašina u vezi sa njihovom sintezom i analizom.
U ovom radu je izvršena analiza, jer istražuje se postojeći mehanizam.
Predmetni projekat iz discipline „Teorija mehanizama i mašina“ predviđa proračun mehanizma u tri glavna dela:
1. Strukturna analiza.
3. Kinetostatička analiza.
Svaka sekcija izvodi određeni skup proračuna neophodnih za proučavanje datog mehanizma.
Strukturna analiza daje opšta ideja o strukturi mehanizma koji se proučava. Ovaj odjeljak ne uključuje veliku količinu proračuna, već samo daje početne informacije o dijelovima i cijelom mehanizmu u cjelini. Ove informacije će biti neophodne u budućnosti prilikom izračunavanja mehanizma.
Kinematička analiza temelji se na rezultatima konstruktivne analize i uključuje proračun kinematičkih karakteristika. U ovom odeljku se prikazuju položaji mehanizma u različitim vremenskim momentima, izračunavaju se brzine, ubrzanja i kretanja tačaka i karika mehanizma. Proračuni se izvode različitim metodama, posebno metodom planova (tj. rješavanje jednadžbi na vektorski način), metodom kinematičkih dijagrama, u kojoj se konstruiraju dijagrami kinematičkih karakteristika, te se pomoću njih proučava mehanizam.
Kinetostatička analiza ili proračun sila omogućava izračunavanje sila i reakcija koje djeluju na mehanizam, ne samo vanjskih sila kao što je gravitacija, već i sila isključivo unutrašnje prirode. To su sile - reakcije veza koje nastaju kada se isključi bilo koja karika. U proračunima sila djelomično se koriste iste metode kao i u kinematičkoj analizi, ali se pored njih koristi i N.E. metoda. Žukovskog, što vam omogućava da provjerite ispravnost rada.
Sve metode koje se koriste u radu su jednostavne i prilično precizne, što nije nevažno u inženjerskim proračunima ove vrste.
Odjeljak 1. Strukturna analiza mehanizma
Strukturna analiza vam omogućava da shvatite strukturu mehanizma. Glavni ciljevi koje treba postići u ovoj sekciji su:
1) Određivanje strukture mehanizma;
2) Proračun pokretljivosti mehanizma;
3) Određivanje klase mehanizma;
Mehanizam klizača radilice radna mašina prikazano na sl. 1.1, sastoji se od: 0 - postolja; 1 - radilica; 2 - klipnjača; 3 - klizač.
Ukupan broj karika mehanizma je N=4.
Odredimo mobilnost mehanizma pomoću formule Čebiševa:
W = 3n - 2P 5 - P 4 , (1.1)
gdje je n broj pokretnih karika (n = 3), P 5 je broj parova pete klase, P 4 je broj parova četvrte klase.
Hajde da opišemo blok dijagram mehanizma:
Rice. 1.2 Blok dijagram
Broj parova pete klase P 5: (0;1), (1;2), (2;3),
Broj parova četvrte klase P 4 = 0.
Mobilnost mehanizma (1.1):
Zapišimo formulu za strukturu mehanizma:
Klasa mehanizma - II.
Odjeljak 2. Kinematička analiza mehanizma
ručica klizna kinematička poluga
U ovom odeljku rešavaju se problemi kinematičke analize kolenasto-kliznog mehanizma radne mašine i to: konstruisano je obeležavanje mehanizma za njegovih dvanaest pozicija; određuju se položaji centara mase karika; izrađuju se planovi za brzine i ubrzanja; određuju se vrijednosti brzine, ubrzanja i pomaka izlazne veze; određuju se ekstremni položaji mehanizma; izrađuju se kinematičke dijagrame.
2.1 Kinematička analiza metodom plana
Kinematička analiza metodom plana (grafoanalitička metoda) je prilično jednostavna, intuitivna i ima dovoljnu tačnost za inženjerske proračune. Njegova suština je da se odnos između brzina i ubrzanja opisuje vektorskim jednadžbama koje se rješavaju grafički.
2.2.1 Označavanje mehanizma
Oznaka mehanizma predstavlja mehanizam u dvanaest pozicija u određenim vremenskim momentima. Označavanje mehanizma se zasniva na početnim podacima. Prilikom izrade oznaka, glavni zadatak je održavanje proporcija dimenzija karika i cjelokupnog dizajna mehanizma.
Za izradu oznaka potrebno je izračunati faktor skale, koji vam omogućava da zadržite sve proporcije i povežete stvarne dimenzije mehanizma s dimenzijama korištenim u grafičkom dijelu. Faktor razmjera se određuje iz omjera stvarne veličine mehanizma (izražene u metrima) i veličine na listu u grafičkom dijelu (izražene u milimetrima). Nađimo vrijednost faktora razmjera koristeći stvarnu veličinu poluge jednake 0,280 m i veličinu poluge na listu u grafičkom dijelu, za koju uzimamo 70 mm
gdje je stvarna veličina radilice.
Koristeći rezultirajući faktor skaliranja, izračunavamo preostale dimenzije karika mehanizma.
Isto za sve ostale veličine. Rezultati proračuna veličine prikazani su u tabeli 1.
Tabela 1
Na osnovu dobijenih dimenzija gradimo dvanaest pozicija mehanizma, striktno poštujući sve proporcije i osnovnu strukturu. Označavanje mehanizma je ugrađeno na prvom listu grafičkog dijela kursnog projekta. Na sl. 2.1.1 prikazuje mehanizam u dvanaest pozicija.
Rice. 2.1.1 Mehanizam u dvanaest pozicija
2.1.2 Proračun brzina
Proračuni brzine su napravljeni za svih dvanaest pozicija mehanizma. Izračunavaju se linearne i ugaone brzine svih karika, kao i brzine centara mase.
Izračunat ćemo brzine i izraditi planove za poziciju br. 2 mehanizma.
Ugaona brzina ručice:
Koristeći vrijednost ugaone brzine radilice, određujemo brzinu tačke A:
gdje je dužina veze OA.
Napišimo vektorsku jednačinu za brzinu tačke B:
U ovoj jednačini znamo smjerove vektora brzina V B, V A, V AB. Brzina tačke B je usmerena duž t-t vodilice, brzina tačke A je usmerena okomito na radilicu OA, a brzina karike AB je usmerena okomito na ovu kariku. Poznavajući smjer brzina i vrijednost brzine tačke A, jednačinu (2.1) rješavamo grafički (slika 2.1.2). Da bismo to učinili, prvo ćemo odrediti vrijednost faktora skale koji je neophodan za izgradnju. Određuje se slično faktoru skale koji se nalazi u paragrafu 2.1.1:
gdje je pa segment koji prikazuje brzinu tačke A na planu brzine (pa se bira proizvoljno).
Nakon određivanja faktora skale, rješavamo vektorsku jednačinu (2.1) (slika 2.1.2). Da biste to učinili, označite tačku p v - stup, iz nje izvlačimo segment p v a, jednak vrijednosti brzine tačke A i usmjeren okomito na polugu OA. Sa kraja konstruisanog segmenta povlačimo liniju delovanja relativne brzine koja je usmerena okomito na AB; u tački preseka ovog vektora sa t-t vodičem nalaziće se tačka b. Vektor p v b određuje brzinu tačke B, usmjeren je od pola p v.
Određujemo numeričku vrijednost brzina mjerenjem rezultirajućih segmenata i množenjem ih faktorom skale:
Ugaone brzine izračunavamo pomoću formula:
gdje je dužina klipnjače (m).
Položaj centara masa na planu brzina će biti određen svojstvom sličnosti:
Brzina centra mase klipnjače je:
U ovom radu proračuni brzine se vrše za svih dvanaest pozicija. Proračun se provodi slično kao u razmatranoj situaciji. Vektori svih brzina potiču sa jednog pola. Rezultati proračuna (full speed plan) prikazani su na prvom listu grafičkog dijela projekta. Vrijednosti svih brzina karika mehanizma i tačaka veze prikazane su u tabeli 2.
tabela 2
2.1.3 Proračun ubrzanja
Proračuni ubrzanja provode se za dvije pozicije radnog hoda mehanizma, u kojima korisna sila otpora nije jednaka nuli. Ubrzanja se određuju slično brzinama čiji je proračun urađen gore (odjeljak 2.1.2).
Prvo, odredimo ubrzanje tačke A radilice. Ona je konstantna i jednaka je umnošku kvadrata ugaone brzine radilice i njene dužine:
Ubrzanja ćemo pronaći metodom plana; za to ćemo napisati vektorsku jednadžbu za ubrzanje tačke B:
gdje su i normalna i tangencijalna komponenta ubrzanja veze AB, respektivno.
Rešimo jednačinu (2.10) grafički. Da bismo to učinili, uzimamo faktor skale plana ubrzanja jednak:
Gradimo plan ubrzanja prema smjeru vektora:
Usmjereno od tačke A do tačke O 1;
Usmjereno od tačke B do tačke A;
Usmjeren okomito na vezu AB;
Smjer je zadan pomoću t - t vodiča.
Odredimo normalnu komponentu ubrzanja veze AB:
Da biste napravili plan ubrzanja:
· izabrati pol r a;
· konstruisati vektor ubrzanja tačke A;
· od kraja vektora gradimo zrak paralelan vezivanju AB, i na tom zraku odlažemo segment an jednak: ;
· kroz tačku n povučemo pravu pravu okomitu na AB, označimo tačku njenog preseka sa t-t vodilicom - tačkom b;
· segment p a b - ubrzanje tačke B na planu ubrzanja.
Ubrzanje centara mase određeno je principom sličnosti:
Plan ubrzanja za poziciju br. 2 prikazan je na sl. 2.1.4
Rice. 2.1.4 Plan ubrzanja za poziciju br. 2
Numeričke vrijednosti ubrzanja izračunavamo pomoću formula:
Dobijene vrijednosti svih ubrzanja za položaje mehanizma br. 8 i br. 10 date su u tabeli 3.
Tabela 3
2.2 Kinematička analiza metodom dijagrama
Metoda kinematičkih dijagrama omogućava vam da jasno vidite kako se pomak, brzina i ubrzanje mijenjaju tokom ciklusa rada mehanizma.
Uzmimo da je faktor skale jednak.
Da bismo konstruirali dijagrame, potreban nam je faktor vremenske skale i faktor skale ugla rotacije. Ove koeficijente izračunavamo pomoću formula:
gdje je t c - vrijeme ciklusa, ; L=180 mm.
Dijagram pomaka je prikazan na sl. 2.2.1
Slika 2.2.1. Dijagram kretanja
Brzine izlazne veze prenosimo na dijagram brzine, uzimajući u obzir dobijene faktore skale. Dobijene vrijednosti brzine povezujemo linijom, a kao rezultat imamo dijagram za brzinu izlazne veze u dvanaest pozicija mehanizma (slika 2.2.2).
Dijagram brzine je izgrađen na prvom listu grafičkog dijela.
Rice. 2.2.2. Tabela brzine
Dijagram ubrzanja konstruiran je metodom grafičke diferencijacije. Za ovo:
· dijagram brzina je aproksimiran isprekidanom linijom;
· iz dijagrama brzina prenijeti apscisnu osu na dijagram ubrzanja i nastaviti je izvan ishodišta koordinata (lijevo);
· odvojiti segment H = 20 mm;
· na dijagramu brzine određujemo tačku 1/, a zatim je povezujemo sa tačkom O pravom linijom:
· iz tačke P povučemo zrak paralelan tetivi O1 /. Dobijamo tačku 1 // ;
· segment O1 // prikazuje prosječno ubrzanje u vremenskom intervalu (0;1);
· za pronalaženje tačke u dijagramu ubrzanja potrebno je vratiti okomicu iz sredine vremenskog intervala (0;1) i projektovati tačku 1 // na ovu okomicu;
· Ove konstrukcije ponavljamo za cijeli vremenski interval.
Odredimo faktor skale dijagrama ubrzanja:
Rice. 2.2.3. Dijagram ubrzanja
Odjeljak 3. Analiza kinetostatskog mehanizma
Ciljevi kinetostatska analiza:
· određivanje sile korisnog otpora u razmatranim pozicijama mehanizma;
· određivanje reakcija u kinematičkim parovima;
· određivanje balansnog momenta metodom planova;
· određivanje momenta ravnoteže metodom “tvrde poluge” N.E. Zhukovsky
3.1 Proračun sile primjenom planske metode
Proračun sile planskom metodom omogućava određivanje reakcija u kinematskim parovima i balansnog momenta. Ova metoda je jednostavna, intuitivna i dovoljno precizna za inženjerske proračune.
3.1.1 Određivanje korisne sile otpora
Postupak izrade oznaka za proračun sile mehanizma ne razlikuje se od njegove konstrukcije u dijelu kinematičke analize, pa ovdje nije potrebno dodatno objašnjenje. Nakon konstruiranja označavanja, prelazimo na dijagram sila, koji se mora prenijeti iz izvornih podataka na list. Važno je odrediti. veličinu sila otpora u svakoj poziciji označavanja i utvrditi njihovu korespondenciju sa tim položajima. Na oznakama mehanizma nalaze se oznake za položaj tačke B klizača. Usmerimo ordinatnu osu željenog grafa paralelno sa putanjom tačke B od njene nulte pozicije prema drugoj krajnjoj poziciji. Usmjerimo osu apscise okomito na ovu osu. U ovom slučaju, kretanje tačke B je u suštini iscrtano duž ordinatne ose, a sila otpora P je prikazana duž ose apscise na isti način kao na originalnom grafikonu.
U odabranom koordinatnom sistemu potrebno je ucrtati razmjere duž obje ose, a zatim i koordinatnu mrežu na potpuno isti način kao što je to urađeno na originalnom grafikonu u zadatku za predmetni projekat. Čitajući koordinate niza karakterističnih tačaka originalnog grafa, te tačke konstruišemo u koordinatnom sistemu pripremljenom za to, a zatim povezujemo iscrtane tačke uzastopno jedna s drugom, što daje željeni graf.
Spuštanjem okomica sa oznaka putanje na os ordinate grafika, dobijamo apscisu P u traženim pozicijama za označavanje radnog hoda mehanizma. Imajte na umu da je skala duž ordinatne ose grafikona jednaka skali za označavanje (slika 3.1.1 a)
Nađimo sile otpora:
za 2. poziciju:
R s_ 2 = 1809 N,
Za 4. poziciju:
R s_ 4 = 1298 N.
Slika 3.1.1a Određivanje korisne sile otpora
3.1.2 Proračun sile konstruktivne grupe
Pomerimo kariku AB sa oznake mehanizma i u tački A je oslobodimo od veza, odbacujući kariku 1 i zamenjujući dejstvo ove karike reakcijom, koja zauzvrat ima normalne i tangencijalne komponente.
Na karike grupe primjenjujemo sile gravitacije, inercije, korisni otpor i reakciju veza. U dijagramu opterećenja (Sl. 3.1.1) sile prikazujemo segmentima proizvoljne veličine, ali striktno održavajući smjer tih sila. Inercijalne sile usmjeravamo u smjeru suprotnom od ubrzanja odgovarajućih tačaka. Korisna sila otpora je usmjerena u smjeru suprotnom od smjera brzine klizača u odabranom položaju.
Rice. 3.1.1. Dijagram opterećenja strukturne grupe za poziciju br. 2
Odredimo silu inercije klizača u položaju br. 7:
Sile inercije veze AB:
Zapišimo zbir momenata u odnosu na klizač B:
Iz jednačine (3.3) izražavamo:
Zapišimo zbir svih sila koje djeluju na grupu:
Rešimo jednačinu (3.5) grafički (slika 3.1.4). Odaberimo faktor skale. Odaberemo stub kroz koji crtamo ravnu liniju paralelnu dijagramu opterećenja i na nju položimo segment koji ga predstavlja. Vektore svih sila konstruišemo sekvencijalno u skladu sa jednačinom (3.5) tako da se nepoznate reakcije konstruišu poslednje. Presjek linija djelovanja ova dva vektora će dati rješenje ove jednačine. Na sl. 3.1.2 prikazuje plan sile za grupu prikolica na poziciji br. 2 mehanizma.
Rice. 3.1.2. Plan sile za grupu prikolica
Da bi se odredile numeričke vrijednosti nepoznatih reakcija, potrebno je izmjeriti segmente koji označavaju ove reakcije na planu sila i pomnožiti ih faktorom skale.
Dobijene vrijednosti proračuna i konstrukcija unose se u tabelu.
3.1.3 Proračun snage originalnog mehanizma
Proračun sile radilice omogućava vam da odredite moment balansiranja.
Da bismo izračunali, pomjerimo početnu kariku sa oznake, odbacimo postolje i zamijenimo ga nepoznatom reakcijom R01. Opteretimo radilicu silama gravitacije i reakcijama spajanja (slika 3.1.3).
Moment ravnoteže M ur određujemo iz jednačine ravnoteže poluge u obliku momenata u odnosu na tačku O 1.
Iz jednačine (3.6) izražavamo moment M ur i nalazimo njegovu brojčanu vrijednost:
Da bismo pronašli nepoznatu reakciju R 01, kreiramo jednadžbu za sve sile koje djeluju na vezu i rješavamo je metodom plana:
Rice. 3.1.4. Plan snaga originalnog mehanizma
Reakcija R01:
3.2 Proračun sile metodom “tvrde poluge” N.E. Zhukovsky
Glavni zadatak proračuna sile primjenom metode "tvrde poluge" Žukovskog je provjeriti ispravnost konstruiranja planova sila i određivanje reakcija u kinematičkim parovima.
Od proizvoljne tačke uzete kao P pol, gradimo plan ubrzanja za poziciju br. 8 i rotiramo ga za 90 0 u smjeru kazaljke na satu u odnosu na njegovu normalnu poziciju. Plan brzine za poziciju broj 8 izrađen je u paragrafu 2.1.2. Te sile prenosimo na krajeve vektora brzina tačaka u kojima djeluju sile primijenjene na mehanizam, zadržavajući njihove točne smjerove.
Određujemo smjer i vrijednost momenata inercije koji djeluju na mehanizam. Pošto se ab i na planu brzine poklapaju sa AB na oznaci mehanizma, onda
Rice. 3.2.1. "tvrda poluga"
Jednačine ravnoteže plana brzine sastavljamo kao uslovnu krutu polugu u obliku momenata sila u odnosu na pol plana brzine. Ruke sile se preuzimaju direktno sa poluge bez ikakvih transformacija:
definiramo:
Trenutak balansiranja:
Odredimo grešku:
Greška se stoga može zaključiti da je proračun pravilno napravljen.
Proračun sile za poziciju br. 4 se vrši na sličan način.
Proračun snage vučene konstruktivne grupe na poziciji br.4
Proračun sile mehanizma u 10. poziciji provodi se na sličan način. Kao rezultat proračuna dobijamo:
Zaključak
U ovom predmetnom projektu riješeni su problemi kinematičke i kinetostatičke analize mehanizma. Tokom projekta ostvareni su sljedeći ciljevi:
· izvršen je kompletan kinematski proračun mehanizma;
· određuju se vrijednosti brzina, ubrzanja i kretanja karika i tačaka mehanizma;
· pronađene su pozicije radnog hoda mehanizma;
· određuju se sile i reakcije koje djeluju na mehanizam;
Dobijene vrijednosti tokom proračuna i proračuna provjerene su metodom Žukovskog. Ovom metodom utvrđena je greška na poziciji br. 2 () i na poziciji br. 4 (), koja se pokazala manjom od dozvoljene, što ukazuje na ispravne konstrukcije i proračune.
Bibliografija
1. N.N. Fedorov. Dizajn i kinematika ravnih mehanizama. Tutorial. Omsk, Omski državni tehnički univerzitet, 2010.
2. N.N. Fedorov. Kinetostatika ravnih mehanizama i dinamika mašina. Tutorial. Omsk, Omski državni tehnički univerzitet, 2009.
3. Artobolevsky I. I. Teorija mehanizama i mašina. Udžbenik za univerzitete - M.: Nauka, 1988.
4. Kozhevnikov S.N. Teorija mehanizama i mašina. -M.: Nauka, 2012.
Objavljeno na Allbest.ru
Slični dokumenti
Kinematsko i kinetostatičko proučavanje mehanizma radne mašine. Proračun brzina metodom plana. Proračun snage strukturne grupe i vodeće karike metodom plana. Određivanje sile balansiranja metodom “tvrde poluge” N.E. Zhukovsky.
kurs, dodato 04.05.2016
Strukturna analiza koljenasto-kliznog mehanizma. Izrada planova položaja, brzina, ubrzanja i kinematičkih dijagrama. Određivanje rezultirajućih sila inercije i balansne sile. Proračun momenta inercije zamašnjaka. Sinteza zupčastog mehanizma.
kurs, dodan 23.01.2013
Strukturna analiza polužnog mehanizma radne mašine, njegovo kinematičko i dinamičko proučavanje. Mehanizam klizača radilice, njegovi pokretni zglobovi. Izrada planova mehanizma, brzina i ubrzanja. Proračun snage polužnog mehanizma.
kurs, dodato 27.05.2015
Strukturna analiza koljenasto-kliznog mehanizma, identifikacija njegovog strukturnog sastava. Sinteza kinematička šema. Kinematička analiza ravnog mehanizma. Određivanje sila koje djeluju na karike mehanizma. Kinetostatska metoda analize sila.
laboratorijski rad, dodano 13.12.2010
Određivanje položaja, brzina i ubrzanja karika veze i njihovih različitih tačaka. Proučavanje kretanja veza metodom dijagrama, planova ili koordinata. Proračun sila koje djeluju na karike metodom planova sila i poluge Žukovskog.
kurs, dodan 28.09.2011
Strukturna i kinematička analiza mehanizma mašine za kovanje i štancanje metodom planova i dijagrama. Određivanje sila i reakcija koje djeluju na karike u kinematičkim parovima. Određivanje sile ravnoteže metodom “tvrde poluge” N. Žukovskog.
kurs, dodan 01.11.2013
Strukturna i kinematička analiza koljenasto-kliznog mehanizma. Određivanje linearnih i ugaonih brzina i ubrzanja. Proračun najveće sile kočenja u uređaj za kočenje; kinematičke parametre pogona mjenjača, zupčanik i osovine.
test, dodano 22.03.2015
Strukturna i kinematička analiza polužnog mehanizma prese za izvlačenje. Definicija klase i njena dekompozicija na grupe Asura. Izrada planova položaja mehanizama, brzina i ubrzanja. Određivanje sile balansiranja metodom poluge Žukovskog.
kurs, dodato 17.05.2015
Kinematički dijagram mehanizma radilice. Početna pozicija vodeće karike. Kinematički dijagrami, planovi brzine i ubrzanja. Određivanje momenta balansiranja na pogonskoj radilici, ispitivanje metodom poluge Žukovskog.
test, dodano 27.07.2009
Osnove kinematičkog i kinetostatičkog istraživanja mehanizma radilice. Izrada crteža plana brzina, ubrzanja i statističkih momenata sa naknadnim proračunom njihovih vrijednosti. Konstrukcija hodografa brzine kinematičkog para.
Dato (slika 2.10): j 1, w 1 =const, l B.D. l DC, l AB, l BC, m l [ Mmm ] .
Brzina V B= w 1 l A B tačka B je usmjerena okomito na vezu AB u smjeru njene rotacije.
Da bismo odredili brzinu tačke C, kreiramo vektorsku jednačinu:
C = B+ NE
Smjer apsolutne brzine tačke C je poznat - paralelno sa pravom x-x. Brzina tačke B je poznata, a relativna brzina V C B je usmerena okomito na vezu BC.
Izrađujemo plan brzine (slika 2.11) u skladu sa gore napisanom jednačinom. U ovom slučaju m n = V B / Rv[m/s mm ].
Apsolutno ubrzanje tačke B jednako je normalnom ubrzanju a p VA(od w 1 = const, e 1 =0 i A t V =0) a B = a p BA = w 2× l VA[m/s2]
i usmjerena je duž veze AB od tačke B do tačke A.
Faktor skale plana ubrzanja m a = a B / str V[m/s mm], gdje je str V- segment proizvoljne dužine koji prikazuje ubrzanje na planu a B.
Ubrzanje tačke C:
![]() (1 način),
(1 način),
Gdje a p SV = V 2 SV / l SV[m/s2]
Segment koji prikazuje ovo ubrzanje na planu ubrzanja:
p SV = a p SV / m A[mm ]
Biramo pol p plana ubrzanja. Od pola povlačimo liniju duž koje je usmjereno ubrzanje a B(//AB) i odvojite odabrani segment str V, prikazujući ovo ubrzanje na planu (slika 2.12). Od kraja rezultujućeg vektora povlačimo liniju za normalnu komponentu a p NE paralelno sa NE vezom i odvojite segment p sv, koji prikazuje u mjerilu m A Ovo je normalno ubrzanje. Od kraja vektora normalnog ubrzanja povlačimo liniju pravca za tangencijalnu komponentu a t NE, a sa pola str - smjer apsolutnog ubrzanja tačke C ( ïï xx). Na preseku ova dva pravca dobijamo tačku C; u ovom slučaju, vektor pC predstavlja željeno ubrzanje.
Modul ovog ubrzanja je jednak:
i C = ( str sa) m A[m/s2]
Kutno ubrzanje e 2 je definisan kao:
e 2 = a t NE / l NE= (tCB) m a/l NE[1/s2]
Smjer e 2 prikazano na dijagramu mehanizma.
Da biste pronašli brzinu tačke D trebate koristiti teorema sličnosti, koji se koristi za određivanje brzina i ubrzanja tačaka na jednoj vezi kada su poznate brzine (ubrzanja) dve druge tačke na ovoj vezi: relativne brzine (ubrzanja) tačaka jedne veze formiraju figure na planovima brzine (ubrzanja), slične istoimenoj slici na dijagramu mehanizma. Ove figure se nalaze na sličan način, tj. Prilikom čitanja slovnih oznaka u jednom smjeru na dijagramu mehanizma, slova na planu brzine (ubrzanja) slijede u istom smjeru.
Da bismo pronašli brzinu tačke D, potrebno je konstruisati trokut sličan trokutu u dijagramu mehanizma.
Trouglovi D cvd(na planu brzine) i DSVD (na planu mehanizma) su trouglovi sa međusobno okomitim stranicama. Dakle, za konstruisanje trougla D cvd povući okomite na CD i BD iz tačaka c i V respektivno. Na njihovom presjeku dobijamo tačku d koju povezujemo sa stupom.
Ubrzanje tačke D je takođe određeno teoremom sličnosti, pošto su ubrzanja druge dve tačke veze 2 poznata, tj. A U i A C. Potrebno je konstruisati trougao D na planu ubrzanja V cd, slično trokutu DBCD na dijagramu mehanizma.
Da bismo to učinili, prvo ćemo ga izgraditi na dijagramu mehanizma, a zatim ga prenijeti u plan ubrzanja.
Segment linije" Ned Plan ubrzanja prenosimo na istoimeni segment NE na dijagramu mehanizma, postavljajući ga na NE vezu iz bilo koje tačke (C ili B) (slika 2.10). Zatim duž segmenta " Ned» na mehanizmu je izgrađen trougao D V dc, slično trouglu DBDC, za koji se iz tačke „C“ povlači prava „dc“, paralelna pravoj liniji DC, sve dok se ne seče sa pravom VD. Dobijamo D V dc~DBDC.
Rezultirajuće stranice trokuta r 1 i r 2 jednake su po veličini stranicama željenog
|
|
|

| |
trougao na planu ubrzanja, koji se može konstruisati pomoću serifa (slika 2.12). Zatim morate provjeriti sličnost rasporeda figura. Dakle, čitajući slovne oznake vrhova trokuta DBDC na dijagramu mehanizma u smjeru kazaljke na satu, dobivamo red slova B-D-C; na planu ubrzanja u istom pravcu, tj. u smeru kazaljke na satu, trebalo bi da dobijemo isti redosled slova V-d-s. Prema tome, rješenje je zadovoljeno lijevom presječnom tačkom kružnica r 1 i r 2.
Šta ćemo sa primljenim materijalom:
Ako vam je ovaj materijal bio koristan, možete ga sačuvati na svojoj stranici na društvenim mrežama:
| Tweet |
Sve teme u ovoj sekciji:
Grafička metoda kinematičkog istraživanja
2.1.1 Osnovne jednadžbe za određivanje brzina i ubrzanja……………………………………………..25 2.1.2 Kinematika mehanizama sa četiri šipke…………………………
Zglobna četverokraka
Dato (slika 2.6): j1, w1 = const, l1, l2, l3, lo = lAD, ml [m/mm].
Crank mehanizam
Dato (slika 2.13): j1, w1=const, l1, l0= lAC, ml[m/mm]. Tačka B koja pripada prvoj
Kinematička sinteza mehanizama s ravnim polugom
Kinematska sinteza– ovo je dizajn dijagrama mehanizma na osnovu njegovih specificiranih kinematičkih svojstava. Prilikom projektovanja mehanizama, prvenstveno na osnovu iskustva, u odnosu na
Uslov za postojanje poluge u mehanizmu sa četiri šipke
Uvjeti postojanja poluge u mehanizmima sa četiri šipke određeni su Grashofovom teoremom: ako je u zatvorenom kinematičkom lancu sa četiri šarke zbir dužina
Primjena Grashofove teoreme na kinematski lanac s translacijskim parom
Povećanjem veličine rotacijskih parova moguće je dobiti translacijske parove širenjem osovina. Veličina šarke D (slika 2.19b) može se uzeti i većom
Razmotrimo mehanizam radilice-klizača u kojem je linija kretanja
klizač je pomaknut u odnosu na centar rotacije poluge. Količina "e" se naziva pomakom ili disaksijalnom. Hajde da odredimo u kom odnosu veličine
Crank mehanizam
Razmotrimo dvije opcije za mehanizam klackalice: s ljuljačkom klackalicom i s rotirajućom klackalicom. Da biste dobili mehanizam sa ljuljačkom, potrebno je da dužina postolja bude veća od dužine poluge,
Zglobno sa četiri poluge
Razmotrimo zglobnu kariku sa četiri karike (slika 2.27), koja je u ravnoteži pod dejstvom zadatih momenata: pogonskog motora na pogonskoj karici 1 i otpornog momenta
Sinteza mehanizama sa četiri poluge na osnovu položaja karika
Mehanizmi sa četiri šipke često se koriste za nošenje raznih predmeta od pozicije do pozicije. U ovom slučaju, predmet koji se nosi može biti spojen i na klipnjaču i
Dinamička analiza i sinteza mehanizama
Svrha dinamičkog istraživanja je da se dobije zakon kretanja mehanizma (njegovih karika) u zavisnosti od sila koje na njega deluju. Prilikom rješavanja ovog problema razmotrićemo
I II III
I – prva karika vrši rotacijski pokret; II – karika 2 čini složeno kretanje, III – karika 3 se kreće naprijed. Kako bi se utvrdilo
Zupčanik i zupčanik
Ako se središte jednog od kotača ukloni iz beskonačnosti, tada će se njegove kružnice pretvoriti u paralelne prave linije; tačka N1 tangente generišuće linije (ona je takođe zajednička normala i
ipno-klizač mehanizam
2.1. Blok dijagram mehanizma
Slika 2.1 Blok dijagram kliznog mehanizma radilice
2.2. Identifikacija složenih i razmaknutih kinematičkih parova
U mehanizmu radilica-klizač nema razmaknutih kinematičkih parova. Par IN kompleksa, pa ćemo ga smatrati kao dva kinematička para.
2.3. Klasifikacija kinematičkih parova mehanizma
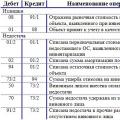
Tabela 2.1
|
br. |
Brojevi veza koje čine par |
Ime |
Mobilnost |
viši/ Najniže |
Zatvaranje (geometrijski/ snaga) |
otvori/ Zatvoreno |
|
|
|
Rotacijski |
||||||
|
Rotacijski |
|||||||
|
Rotacijski |
|||||||
|
Rotacijski |
|||||||
|
Rotacijski |
|||||||
|
|
Rotacijski |
||||||
|
|
Progresivna |



Mehanizam koji se proučava sastoji se samo od jednokrećućih kinematičkih parova ( R 1 = 7, R= 7), gdje je R 1 – broj jednokretnih kinematičkih parova u mehanizmu, R- ukupan broj kinematičkih parova u mehanizmu.
2. 4. Klasifikacija karika mehanizama
Tabela 2.2
|
br. |
Brojevi linkova |
Simbol |
Ime |
Pokret |
Broj vrhova |
|
Odsutan |
|||||
|
Crank |
Rotacijski |
||||
|
|
|||||
|
|
Rotacijski |
||||
|
|
|||||
|
|
Progresivna |




Mehanizam ima: četiri () dvostruke () linearne veze 1,2,4,5; jedna (n 3 =1) veza sa tri vrha, koja je osnovna veza; pet () pokretnih veza.
Pronađite broj priključaka na stalak. Mehanizam transportera ima tri () veze sa postoljem.
U složenom mehanizmu koji se proučava može se izdvojiti jedan elementarni mehanizam
Rice. 2.4 Mehanizam klizača radilice.
U ispitivanom mehanizmu radilice nema mehanizama sa otvorenim kinematičkim lancima.
Mehanizam sadrži samo jednostavne stacionarne mehanizme.
U ispitivanom mehanizmu nema karika za pričvršćivanje. Link 3 je istovremeno uključen u dva jednostavna mehanizma - šarku sa četiri šipke i klizač. Dakle, za ovaj link
Hajde da klasifikujemo mehanizam. Mehanizam koji se proučava ima konstantnu strukturu, složen je i istog tipa. Sastoji se od jednog elementarnog mehanizma i dva stacionarna jednostavna, koji sadrže samo zatvorene kinematičke lance.
Mehanizam postoji u trokretnom prostoru.
Formule za određivanje mobilnosti ovih mehanizama imat će sljedeći oblik:

Odredimo pokretljivost šarke sa četiri šipke. Ovaj mehanizam ima: tri () pokretne karike 1,2,3; četiri () jednokretna kinematička para O, A, B, C.
![]()
Pronađimo pokretljivost mehanizma radilice. Ima: () pokretne karike 3,4,5 i četiri () kinematička para C, B, D, K. Njegova pokretljivost se određuje na sličan način:
![]()
Određujemo mobilnost složenog mehanizma pomoću formule:
Analiziramo strukturni model mehanizma mašine. Provjeravamo da li mehanizam koji se proučava odgovara strukturi matematičkog modela. Mehanizam ima: sedam () jednokretnih kinematičkih parova; pet () pokretnih dva vrha () veza, osnovna je ; tri priključka na postolje () i bez karika za pričvršćivanje ().
matematički model:
 ;
;
 ;
;
![]()
![]()
Pošto su se jednačine modela pretvorile u identitete, uređaj koji se proučava ima ispravnu strukturu i predstavlja mehanizam.
Hajde da identifikujemo i klasifikujemo strukturne grupe. Elementarni mehanizam se konvencionalno klasifikuje kao mehanizam klase I.
 |
|||
 |
|||
Klasa strukturne grupe određena je brojem kinematičkih parova uključenih u zatvorenu petlju formiranu od unutrašnjih kinematičkih parova. Redoslijed grupe određen je brojem vanjskih kinematičkih parova. Vrsta grupe se određuje ovisno o lokaciji rotacijskih i translacijskih kinematičkih parova na njoj.
2-red
Vidi se da su identificirane strukturne grupe potpuno slične po vrsti i kvantitativnom sastavu karika i kinematičkih parova. Svaka od strukturnih grupa ima: dve pokretne karike (), a veze su dvotemene () i, prema tome, bazna veza takođe ima dva vrha (); tri () jednopokretna kinematička para, od kojih su dva vanjska ().
Provjeravamo da li odabrane strukturne grupe odgovaraju matematičkim modelima. Pošto su grupe slične, proveru vršimo samo na jednoj grupi, na primer, OAB. Matematički modeli strukturnih grupa imaju oblik:
Mehanizam radilice pripada klasi II.
3. Kinematička analiza mehanizma
Kinematička analiza bilo kojeg mehanizma sastoji se od određivanja: ekstremnih (mrtvih) položaja mašine, uključujući određivanje putanja pojedinih tačaka; brzine i ubrzanja karakterističnih tačaka karika prema poznatom zakonu kretanja početne karike (generalizovane koordinate).
3.1 Određivanje ekstremnih (mrtvih) položaja mehanizma
Ekstremne (mrtve) pozicije mehanizma mogu se odrediti analitički ili grafički. Budući da analitika pruža veću preciznost, prednost joj se daje pri određivanju ekstremnih pozicija.
Za klizač radilice i četiri karike na šarkama, ekstremni položaji će biti kada su poluga i klipnjača ili prošireni () ili presavijeni () u jednu liniju.
Rice. 3.1 Određivanje krajnjih položaja mehanizma.
3.2 Grafički određivanje položaja veza mehanizma.
Rice. 3.3 Konstrukcija zatvorenih vektorskih kontura.
Blok dijagram mehanizma postavljamo u pravougaoni koordinatni sistem čiji je početak u tački O. Vektore povezujemo sa karikama mehanizma tako da njihov niz bude dva zatvorena kontura: OABCO i CBDC.
Za kolo OABCO:  (3.1)
(3.1)
Zamislimo jednačinu u projekcijama na koordinatne ose.
1. Strukturna analiza mehanizam
Predstavljen je mehanizam klizača radilice.
Određujemo broj stupnjeva mehanizma koji se proučava pomoću formule Čebiševa:
(1)
Gdje n – broj pokretnih karika u kinematičkom lancu koji se proučava; p 4 I p5– broj parova četvrtog i petog razreda.
Odrediti vrijednost koeficijenta n Analizirajmo blok dijagram mehanizma (slika 1):

Slika 1 – Blok dijagram mehanizma
Blok dijagram mehanizma sastoji se od četiri veze:
1 – poluga,
2 – klipnjača AB,
3 – klizač B,
0 – postolje,
u ovom slučaju, veze 1 – 3 su pokretne veze, a stalak 0 je fiksna veza. Predstavljen je u kompoziciji blok dijagram dva zglobno-fiksirana nosača i klizač 3.
dakle, n=3.
Odrediti vrijednosti koeficijenta p 4 I p5 Nađimo sve kinematičke parove koji su dio kinematičkog lanca koji se razmatra. Rezultati studije su prikazani u tabeli 1.
Tabela 1 – Kinematički parovi
| № | Kinematički par (KP) | kino šema - tic couple |
Čas bioskopa- tic couple |
Stepen kretanja |
||||||
| 1 | 0 – 1 | rotacijski |
||||||||
| 2 | 1 – 2 |  |
rotacijski |
1 | ||||||
| 3 | 2 – 3 |  |
rotacijski |
1 | ||||||
| 4 | 3 – 0 |  |
rotacijski |
1 | ||||||
Iz analize podataka u tabeli 1 proizilazi da je proučavana mehanizam motora sa unutrašnjim sagorevanjem sa povećanim hodom klipa, sastoji se od sedam parova pete klase i čini zatvoreni kinematički lanac. dakle, p 5 =4, A p 4 =0.
Zamjena pronađenih vrijednosti koeficijenata n, str 5 I p 4 u izraz (1), dobijamo:
Da bismo identificirali strukturni sastav mehanizma, dijelimo dijagram koji se razmatra u Assur strukturne grupe.
Prva grupa veza je 0-3-2 (slika 2).

Slika 2 – Strukturna grupa Assur
Ova grupa se sastoji od dva pokretna dijela:
klipnjača 2 i klizač 3;
dva povodca:
i tri kinematička para:
1-2 – rotacijski par pete klase;
2-3 – rotacioni par pete klase;
3-0 – progresivni par petog razreda;
tada je n=2; p 5 =3, a p 4 =0.
Zamjenom identificiranih vrijednosti koeficijenata u izraz (1),
Dakle, grupa veza 4-5 je strukturna grupa Assura 2 klase 2 reda 2 vrste.
Druga grupa veza je 0-1 (slika 3).

Slika 3 – Primarni mehanizam
Ova grupa karika sastoji se od pokretne karike - poluge 1, nosača 0 i jednog kinematičkog para:
0 – 1 – rotacioni par pete klase;
tada je n=1; p 5 =1, a p 4 =0.
Zamjenom pronađenih vrijednosti u izraz (1) dobijamo:
Stoga je grupa karika 1 – 2 zaista primarni mehanizam sa mobilnošću 1.
Strukturna formula mehanizma
MEHANIZAM=PM(W=1) + SGA(2. klasa, 2. red, 2. tip)
2. Sinteza kinematičke šeme
Da bi se sintetizovala kinematička šema, prvo je potrebno ustanoviti faktor skale dužine μ ℓ. Da biste pronašli μ ℓ, potrebno je uzeti prirodnu veličinu poluge OS i podijeliti je veličinom segmenta proizvoljne dužine │OC│:
Nakon toga, koristeći faktor skale dužine, sve prirodne dimenzije karika pretvaramo u segmente, uz pomoć kojih ćemo izgraditi kinematičku dijagram:

Nakon izračunavanja dimenzija prelazimo na konstruiranje jedne pozicije mehanizma (slika 4) metodom serifa.
Da biste to učinili, prvo izvucite stup 0 na koji je pričvršćena poluga. Zatim povlačimo vodoravnu pravu liniju XX kroz centar kruga koji je nacrtan za izgradnju postolja. Potrebno je za naknadno pronalaženje središta klizača 3. Zatim iz središta istog kruga nacrtamo dva druga s polumjerom
i . Zatim odatle crtamo segment dužine pod uglom u odnosu na horizontalnu liniju XX. Tačke preseka ovog segmenta sa konstruisanim kružnicama biće tačke A i C, respektivno. Zatim iz tačke A konstruišemo kružnicu poluprečnika .Tačka presjeka ove kružnice s pravom XX bit će tačka B. Nacrtamo vodilicu za klizač, koja će se poklopiti sa pravom linijom XX. Izrađujemo klizač i sve ostale potrebne detalje crteža. Označavamo sve tačke. Sinteza kinematičke šeme je završena.
3. Kinematička analiza ravnog mehanizma
Počnimo da pravimo plan brzine za položaj mehanizma. Da biste pojednostavili proračune, trebali biste izračunati brzine i smjerove za sve točke položaja mehanizma, a zatim napraviti plan brzine.

Slika 4 – Jedan od položaja mehanizma
Analizirajmo dijagram mehanizma klizača radilice: tačke O i O 1 su fiksne tačke, stoga su moduli brzine ovih tačaka jednaki nuli (
).Vektor brzine tačke A je geometrijski zbir vektora brzine tačke O i brzine relativnog rotacionog kretanja tačke A oko tačke O:
Radna linija vektora brzine
je okomita na os poluge 1, a smjer djelovanja ovog vektora poklapa se sa smjerom rotacije poluge.Tačka modula brzine A:
Ugaona brzina