Lai konstruētu elektrisko piedziņu, ir jāzina darba mašīnas kinemātika un darbības apstākļi. Elektromotora vārpstas slodze sastāv no statiskās un dinamiskās slodzes. Pirmo nosaka lietderīgā un kaitīgā kustības pretestība (no berzes, griešanas, svara uc spēkiem); otrais rodas no kinētiskās enerģijas izmantošanas piedziņas sistēmā, mainoties atsevišķu ierīces daļu kustības ātrumam. Atbilstoši tam motora izstrādātais griezes moments ir
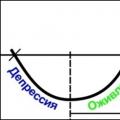
 Šajā izteiksmē M st- statiskais moments, ko izraisa lietderīgās un kaitīgās pretestības spēki. Tas var nebūt atkarīgs no griešanās ātruma (16.2. att., taisni 1),
ja to rada berze, pretestības spēki, griežot metālu utt., vai var zināmā mērā būt atkarīgi no rotācijas ātruma. Piemēram, centrbēdzes sūknim, kas baro sistēmu ar nemainīgu spiedienu, statiskais griezes moments sastāv no nemainīgas sastāvdaļas un komponentes, kas ir proporcionāla griešanās ātruma kvadrātam (16.2. att., līkne). 2).
Griezes moments var būt lineāri atkarīgs no ātruma (3)
un nelineārs (4).
Šajā izteiksmē M st- statiskais moments, ko izraisa lietderīgās un kaitīgās pretestības spēki. Tas var nebūt atkarīgs no griešanās ātruma (16.2. att., taisni 1),
ja to rada berze, pretestības spēki, griežot metālu utt., vai var zināmā mērā būt atkarīgi no rotācijas ātruma. Piemēram, centrbēdzes sūknim, kas baro sistēmu ar nemainīgu spiedienu, statiskais griezes moments sastāv no nemainīgas sastāvdaļas un komponentes, kas ir proporcionāla griešanās ātruma kvadrātam (16.2. att., līkne). 2).
Griezes moments var būt lineāri atkarīgs no ātruma (3)
un nelineārs (4).
Daudzums, kas iekļauts momenta vienādojumā (16.1)
![]()
sauca dinamisks brīdis.Šis punkts var būt gan pozitīvs, gan negatīvs.
Lielums J, kam M DIN ir proporcionāls tiek izsaukts inerces moments.Šī ir visa ķermeņa masu produktu summa m k atsevišķas ķermeņa daļiņas uz attāluma kvadrātu Rk atbilstošās daļiņas no rotācijas ass:
Parasti inerces momentu ir ērti izteikt kā ķermeņa masas reizinājumu ar kvadrātu griešanās rādiuss R in t.i.
Kur R iekšā- attālums no rotācijas ass, kurā nepieciešams koncentrēt visu ķermeņa masu vienā punktā, lai iegūtu inerces momentu, kas vienāds ar faktisko ar sadalīto masu. Vienkāršāko ķermeņu inerces rādiusi norādīti atsauces tabulās.
Inerces momenta vietā piedziņu aprēķinos tika izmantots spararata momenta jēdziens - lielums, kas saistīts ar inerces momentu ar vienkāršu sakarību:
kur G ir ķermeņa svars; D= 2R in- inerces diametrs; g- gravitācijas paātrinājums; GD 2- šūpošanās moments.
Elektromotoru rotoru un armatūru inerces momenti parasti ir norādīti katalogos. Vēlams, lai piedziņas motors būtu tieši savienots ar darba mašīnas darba daļu (piemēram, frēzi), bez starppārvadiem vai siksnu piedziņām. Tomēr daudzos gadījumos tas nav iespējams, jo darba elementam jābūt ar salīdzinoši zemu griešanās ātrumu (50-300 apgr./min) ar ātrgaitas elektromotoru. Nav izdevīgi ražot īpašu zema ātruma elektromotoru. Tam būs pārāk lieli izmēri un svars. Racionālāk ir savienot parasto elektromotoru (750-3000 apgr./min) ar zema ātruma piedziņu caur pārnesumkārbu.
 Bet, aprēķinot sarežģītu piedziņas sistēmu ar rotācijas vai translācijas kustībām un dažādiem tās atsevišķu elementu ātrumiem, ieteicams to nomainīt samazināta sistēma- vienkāršota sistēma, kas sastāv no viena elementa, kas rotē ar elektromotora frekvenci. Pārejot uz reducētu sistēmu no reālās, momenti sistēmā tiek pārrēķināti tā, lai enerģijas apstākļi paliktu nemainīgi.
Bet, aprēķinot sarežģītu piedziņas sistēmu ar rotācijas vai translācijas kustībām un dažādiem tās atsevišķu elementu ātrumiem, ieteicams to nomainīt samazināta sistēma- vienkāršota sistēma, kas sastāv no viena elementa, kas rotē ar elektromotora frekvenci. Pārejot uz reducētu sistēmu no reālās, momenti sistēmā tiek pārrēķināti tā, lai enerģijas apstākļi paliktu nemainīgi.
Piemēram, dzinējs leņķiskais ātrums kura vārpsta ω dv savienota caur vienpakāpju pārnesumu transmisija ar darba mašīnu (16.3. att.), kuras leņķiskais ātrums ir ω p _ m Ja neņemam vērā pārvades zudumus (tie tiek ņemti vērā iepriekš minētajā sistēmā), tad no nemainīgas jaudas nosacījuma izriet:
Kur M st - nepieciešamais darba mašīnas statiskais moments, samazināts līdz motora vārpsta(t.i., motora vārpstas leņķiskais ātrums); M r m ir darba mašīnas faktiskais statiskais moments uz tās vārpstas; k josla = ω dv /ω r, m - pārnesumu attiecība no dzinēja uz darba auto. Ja darba ķermenis spēka F p ietekmē, M veic nevis rotācijas, bet gan translācijas kustības ar ātrumu υP, M, tad pamatojoties uz pastāvīgo jaudu
![]()
un līdz ar to nepieciešamais samazinātais statiskais moments
Samazinātajā sistēmā jāietver arī samazināti inerces momenti.
Samazināts inerces moments sistēma ir inerces moments sistēmai, kas sastāv tikai no elementiem, kas rotē ar dzinēja vārpstas apgriezienu skaitu ω motoru, bet kuru kinētiskās enerģijas rezerve ir vienāda ar faktiskās sistēmas kinētiskās enerģijas rezervi. No kinētiskās enerģijas nemainības nosacījuma izriet, ka sistēmai, kas sastāv no motora, kas savienots caur vienu zobratu un griežas ar leņķisko ātrumu ω p, darba mašīna ar inerces momentu JP, m,
vai vēlamais sistēmas samazinātais inerces moments
Tādējādi kompleksai piedziņai vienādojumi (16.1) un (16.4) nozīmē noteiktās statisko inerces momentu vērtības. Ja brīdis ir zināms M, izteikts Nm, un griešanās ātrumu P, apgr./min, tad atbilstošā jauda R, kW,
kur koeficientam 9550 = 60-10 3 /2l nav dimensijas.
Elektriskās piedziņas kustības pamata vienādojums savieno motora elektromagnētisko griezes momentu, statistisko griezes momentu, integrācijas griezes momentu un motora vārpstas ātrumu.
Izteiksmes kreisajā pusē rakstītā atšķirība atspoguļo dinamisko momentu

Ja dinamiskais griezes moments nav vienāds ar 0, tad elektriskā piedziņa darbojas dinamiskā režīmā, t.i. ir ātruma izmaiņas.
Ja ![]() vai
vai ![]() tad elektriskā piedziņa darbojas statiskā (t.i. uzstādītā) darbības režīmā.
tad elektriskā piedziņa darbojas statiskā (t.i. uzstādītā) darbības režīmā.
ZAUDĒJUMI MEHĀNISKĀ TRANSMISIJĀ. TRANSMISIJAS EFEKTIVITĀTE
Enerģijas (jaudas) zudumi pārvadē tiek ņemti vērā divos veidos:
1) tuvu, t.i. izmantojot efektivitāti un 2) rafinētu, t.i. zaudējumu komponentu tiešais aprēķins. Apsvērsim šīs metodes.
A. Pārvades zudumu uzskaite, izmantojot efektivitāti.
Mehāniskā daļa elektriskā piedziņa (1.17. att.) ietver elektromotora rotoru ar leņķisko ātrumu w un griezes momentu M, transmisijas mehānismu PM ar lietderības koeficientu h p un pārnesumskaitli j un izpildmehānismu IM, uz kura vārpstas moments Tiek piemērots M m un vārpstas ātrums w m. Skaidrības labad apzīmēsim statisko griezes momentu braukšanas režīmā un bremzēšanas režīmā. Motora darbības režīmam, pamatojoties uz enerģijas nezūdamības likumu, mēs varam uzrakstīt vienādību
 ,
,  , Kur
, Kur  ,
,
 - mehānisma moments, kas samazināts līdz elektromotora vārpstai.
- mehānisma moments, kas samazināts līdz elektromotora vārpstai.
Bremzēšanas režīmam mums būs šāda vienlīdzība
 ,
,  ,
,
Bet efektivitāte ir mainīga vērtība, kas ir atkarīga no pastāvīgiem un mainīgiem pārraides zudumiem. Noteiksim griezes momenta zudumu transmisijā motora režīmam
 ,
,
Pieņemsim pieņēmumu, ka bremzēšanas režīmā būs tāds pats griezes momenta zudums. Tad statisko griezes momentu bremzēšanas režīmā var uzrakstīt šādi:
1)  , Tad
, Tad  , kas atbilst bremzēšanas režīmam, kad dzinējs attīsta bremzēšanas momentu. Attiecībā uz pacelšanas mehānismu tā būs lielas slodzes nolaišana, kad moments no slodzes iedarbības uz motora vārpstu M g pārsniedz zuduma momentu DM transmisijā. Mēs iegūstam tā saukto bremžu atbrīvošanu;
, kas atbilst bremzēšanas režīmam, kad dzinējs attīsta bremzēšanas momentu. Attiecībā uz pacelšanas mehānismu tā būs lielas slodzes nolaišana, kad moments no slodzes iedarbības uz motora vārpstu M g pārsniedz zuduma momentu DM transmisijā. Mēs iegūstam tā saukto bremžu atbrīvošanu;
2)  , Tad
, Tad  , kas atbilst nebremzēšanas režīmam, kas nozīmē motora režīmu. Pacelšanas mehānismam tas ir līdzvērtīgs āķa nolaišanai, kad moments no tā svara uz motora vārpstu M K ir mazāks par zuduma momentu DM transmisijā. Mums ir tā sauktā spēka nolaišanās.
, kas atbilst nebremzēšanas režīmam, kas nozīmē motora režīmu. Pacelšanas mehānismam tas ir līdzvērtīgs āķa nolaišanai, kad moments no tā svara uz motora vārpstu M K ir mazāks par zuduma momentu DM transmisijā. Mums ir tā sauktā spēka nolaišanās.
Griezes momenta zudumi transmisijā ir aptuveni izteikti ar diviem komponentiem, no kuriem viens konkrētai transmisijai ir nemainīga vērtība, bet otra ir proporcionāla pārraidītajam griezes momentam:
kur ir pastāvīgo zudumu koeficients;
b – mainīgais zaudējumu koeficients;
M s.nom – nominālais statiskais transmisijas griezes moments;
M pirms – pārvadītais griezes moments, kas ir vienāds ar griezes momentu uz izejas (enerģijas pārneses virzienā) transmisijas vārpstu.
Vienmērīgam motora režīmam  . Pārraides efektivitāti var attēlot ar jaudas attiecību līdzsvara stāvoklī.
. Pārraides efektivitāti var attēlot ar jaudas attiecību līdzsvara stāvoklī.
8.1. PAMATJĒDZIENI UN DEFINĪCIJAS
Definīcija: elektriskā piedziņa ir paredzēta braukšanai dažādas mašīnas un mehānismi. Tas sastāv no elektriskais motors, vadības iekārtas un transmisijas saites no dzinēja uz darba mašīnu. Piedziņa var būt grupas, individuāla un daudzmotoru.
Pirmajā gadījumā viens dzinējs darbina vairākas mašīnas, bet otrajā katra mašīna ir aprīkota ar savu dzinēju.
Vairāku motoru piedziņa ir dzinēju grupa vienā mašīnā, kur katrs dzinējs darbina atsevišķu mehānismu.
Starp galvenajām prasībām attiecībā uz elektrisko piedziņu jāatzīmē:
1. Elektromotoram jābūt ar tādu jaudu, lai tas pārraidītu ne tikai statisko slodzi, bet arī īslaicīgas pārslodzes.
2. Vadības iekārtai jānodrošina visas iekārtas ražošanas procesa prasības, tostarp ātruma kontrole, atpakaļgaita utt.
8.2. ELEKTROPIEDZIŅAS KUSTĪBAS VIENĀDĀJUMS
Kad darbojas elektriskā piedziņa, elektromotora griezes momentam ir jāsabalansē darba mašīnas statiskais pretestības moments, kā arī kustīgo masu inerces radītais dinamiskais moments. Elektriskā piedziņas griezes momenta vienādojumu var uzrakstīt šādi:
kur M ir elektromotora griezes moments;
M s - statiskais pretestības moments;
M din - dinamisks moments.
Dinamiskais jeb inerciālais moments, kā zināms no mehānikas, ir vienāds ar:
kur j ir kustīgo masu inerces moments, reducēts līdz motora vārpstai, kg/m 2 ;
w - motora vārpstas griešanās leņķiskā frekvence, s -1.
Izsakot leņķiskā frekvence griešanās w caur apgriezienu skaitu n, mēs iegūstam:
Elektriskā piedziņas griezes momenta vienādojumu var uzrakstīt citā formā:
![]()
Ja n = const, tad M din = 0, tad M = M s.
8.3.ELEKTROMOTORA JAUDAS IZVELE
No pareizā izvēle Elektromotora jauda ir atkarīga no elektriskās piedziņas tehniskajiem un ekonomiskajiem rādītājiem (izmaksas, izmēri, efektivitāte, ekspluatācijas drošums utt.).
Ja elektromotora slodze ir stabila, tad tā jaudas noteikšana ir ierobežota tikai ar atlasi no kataloga:
kur R n ir izvēlētā dzinēja jauda,
P slodze - slodzes jauda.
Ja elektromotora slodze ir mainīga, tad ir nepieciešams slodzes grafiks I = f(t).
Gludā līkne tiek aizstāta ar pakāpienu līniju, pieņemot, ka laikā t1 motorā plūst strāva I1, laikā t2 - strāva I2 un. utt. (8.3.1. att.).

Mainīgo strāvu aizstāj ar ekvivalentu strāvu I e, kas viena darba cikla t c laikā rada tādu pašu, termiskais efekts ar strāvu, kas mainās pakāpeniski. Pēc tam:
un līdzvērtīga strāva
Elektromotora nominālajai strāvai jābūt vienādai vai lielākai par ekvivalentu, t.i.
Tā kā gandrīz visos motoros griezes moments ir tieši proporcionāls slodzes strāvai M ~ I n, mēs varam uzrakstīt arī ekvivalentā griezes momenta izteiksmi:

Ņemot vērā, ka jauda P = Mw, elektromotoru var izvēlēties arī pēc līdzvērtīgas jaudas:

Atkārtotā īstermiņa režīmā dzinējam darbības laikā nav laika uzkarst līdz noteiktajai temperatūrai, un darbības pārtraukuma laikā tas neatdziest līdz temperatūrai. vidi(8.3.2. att.).

Šim režīmam tiek ieviests relatīvā IESLĒGŠANAS ilguma (DS) jēdziens. Tas ir vienāds ar darba laika summas attiecību pret cikla laiku tc, kas sastāv no darba laika un pauzes laika t o:
![]()
Jo lielāks PV, jo mazāka nominālā jauda ar vienādiem izmēriem. Tāpēc motoru, kas paredzēts darbam 25% cikla laika ar nominālo jaudu, nevar atstāt pie slodzes 60% cikla laika ar tādu pašu jaudu. Elektromotori ir izgatavoti standarta darba cikliem - 15, 25, 40, 60%, ar darba ciklu - 25%; pieņemts kā nomināls. Dzinējs ir paredzēts atkārtotai īslaicīgai darbībai, ja cikla ilgums nepārsniedz 10 minūtes. Ja aprēķinātās PV vērtības atšķiras no standarta vērtībām, tad, izvēloties dzinēja jaudu Re, jāizdara grozījums:

8.4. ELEKTRISKIE APARĀTI UN ELEMENTI
Vienkāršākā un visizplatītākā ierīce elektrisko ķēžu ieslēgšanai un izslēgšanai ir slēdzis
Slēdža veids ir slēdzis, kas var atkārtoti savienot ķēdi, piemēram, apgriežot vai pārslēdzot motora tinumus no zvaigznītes uz trīsstūri.
Slēdzis sastāv no kontaktnaža un divām spīlēm, kas uzstādītas uz izolētas pamatnes. Viens no žokļiem ir eņģes. Atkarībā no kontaktnažu skaita slēdži ir viena, divu un trīs polu. Slēdzis tiek vadīts ar izolētu rokturi, kas apvieno kontaktnažus.
Dažreiz, vadot elektromotorus vai citus izpildmehānismus, tie tiek izmantoti iepakojuma slēdži. Šī ir maza izmēra atvienošanas ierīce, parasti apaļa forma (8.4.1. att.). Kontakti 3 ir montēti fiksētos gredzenos 5, kas izgatavoti no izolācijas materiāla. Gredzenu iekšpusē atrodas kustīgi diski 8 ar kontaktplāksnēm, kas uzstādītas uz ass 7. Vāciņā 6 ir ievietota atsperes ierīce, ar kuras palīdzību tiek veikta ātra aizvēršanās un kontaktu atvēršana tiek panākta neatkarīgi no roktura griešanās ātruma 1.
Slēdzis ir samontēts un piestiprināts pie vāka, izmantojot kronšteinu 4 un tapas 2.
Lai vadītu rotora motorus, ir nepieciešams liels skaits pārslēgšanas darbību, lai ievadītu vai izvadītu papildu pretestības.

Šī operācija tiek veikta kontrolieri, kurus iedala cilindros un izciļņos (8.4.2. att.).
Bungas regulatora kustīgie kontakti, kuriem ir segmentu 4 forma, ir uzstādīti uz vārpstas 5. Fiksētie kontakti 3 ir novietoti uz vertikālās sliedes 2, un tiem ir pievienotas ārējās ķēdes. Kontaktu segmenti ir savienoti viens ar otru pēc noteikta parauga, turklāt tiem ir dažādi loka garumi.
Kad regulatora vārpsta tiek pagriezta, segmenti pārmaiņus saskaras ar fiksētajiem kontaktiem, un ķēde tiek ieslēgta vai izslēgta.

Regulatora vārpsta ir aprīkota ar fiksatoru 1, nodrošinot tai vairākas fiksētas pozīcijas.
Kameru kontrolleri ir uzlaboti nekā bungu kontrolleri. Uz vārpstas 5 ir uzstādīti profila diski 6, kas ar sānu virsmu iedarbojas uz kontaktsviras 7 veltni, tādējādi nosakot kontaktu 4 un 3 aizvērto vai atvērto stāvokli.
Strāvas ķēžu pārslēgšana, izmantojot kontrolierus, prasa ievērojamu fizisku piepūli no operatora. Tāpēc iekārtās ar biežu pārslēgšanu tie tiek izmantoti šim nolūkam. kontaktori.
To darbības princips ir balstīts uz to izmantošanu elektromagnētiskās sistēmas jaudas kontaktu vadīšanai. Kontaktora dizains ir parādīts attēlā. 8.4.3.

Fiksēts barošanas kontakts 2 ir stingri uzstādīts uz izolētas plāksnes 1. Uz sviras 3, kas piestiprināta pie plāksnes, ir kustīgs barošanas kontakts 4.
Strāvas kontaktu vadīšanai uz plāksnes ir uzstādīta magnētiskā sistēma, kas sastāv no serdeņa 5 ar spoli 6 un armatūras 7, kas piestiprināta pie sviras 3. Strāvas padevi kustīgajam kontaktam veic elastīgs vadītājs 8.
Kad spole 6 ir pievienota tīklam, notiks enkura 7 magnētiskā pievilkšanās ar serdi 5 un aizvērsies strāvas kontakti 2 un 4. Lai pārtrauktu strāvas ķēdi, spole 6 tiek atvienota, un armatūra nokrīt no serde zem sava svara.
Papildus strāvas kontaktiem ierīcei ir vairāki bloķējošie kontakti 9, kuru mērķis tiks parādīts zemāk.
Elektromagnēta spoles elektriskā ķēde ir palīgsistēma vai vadības ierīce.
Lai to vadītu, tiek izmantotas vadības pogas. Pogas ir vienas ķēdes un dubultās ķēdes ar parasti atvērtiem un aizvērtiem kontaktiem. Vairumā gadījumu pogas tiek izgatavotas ar pašatgriešanos, t.i. kad mehāniskais spiediens tiek noņemts, to kontakti atgriežas sākotnējā stāvoklī. Attēlā 8.4.4. parādīts pogas dizains ar diviem kontaktu pāriem: parasti atvērts un parasti aizvērts.

Lai aizsargātu elektromotoru no pārslodzes, kontaktorā ir uzstādīti divi termoreleji (divām fāzēm). Šajā gadījumā kontaktoru sauc par magnētisko starteri.
Termiskā releja galvenā daļa (8.4.5. att.) ir bimetāla plāksne 1, kas sastāv no diviem sakausējumiem ar dažādiem izplešanās koeficientiem.

Plāksne vienā galā ir stingri piestiprināta pie ierīces pamatnes, bet otrā galā tā balstās pret fiksatoru 2, kas, iedarbojoties atsperei 3, mēdz griezties pretēji pulksteņrādītāja virzienam. Blakus bimetāla plāksnei ir novietots sildītājs 4, kas virknē savienots ar dzinēju. Kad caur strāvas ķēdi plūst liela strāva, sildītāja temperatūra paaugstinās. Bimetāla plāksne noliecīsies uz augšu un atlaidīs fiksatoru 2. Atsperes 3 darbības rezultātā fiksators griežas un caur izolācijas plāksni 5 atver kontaktus 6 startera vadības ķēdē. Releja atgriešana ir iespējama tikai pēc plāksnes 1 atdzišanas. To veic, nospiežot pogu 7.
Drošinātājus izmanto arī, lai aizsargātu elektroinstalācijas no pārslodzes. Šī ir nekontrolēta ierīce, kurā pārslodze izraisa gluda ieliktņa, kas izgatavota no zemu kūstoša materiāla, izdegšanu. Drošinātāji var būt kontaktdakšas vai cauruļveida (8. 4.6. att.).

Ir arī vadāmas ierīces, kas aizsargā elektroiekārtas no pārslodzes. Tie ietver pārstrāvas relejs(8.4.7. att.).
Releja spole 1 ir paredzēta strāvas plūsmai strāvas ķēdē. Lai to izdarītu, tam ir tinums, kas izgatavots no pietiekama šķērsgriezuma stieples.
Ar strāvu, kurai ir konfigurēts relejs, armatūra 2 tiks piesaistīta spoles serdenim 3, un, izmantojot kontakta tiltu 4, kontakti 5 tiks atvērti magnētiskā startera vadības ķēdē. Šis relejs automātiski pārtrauks strāvas padevi instalācijai no pašreizējā avota.

Nereti ir gadījumi, kad elektroinstalāciju nepieciešams atvienot no tīkla, ja sprieguma līmenis sasniedzis vērtību zem pieļaujamās vērtības. Šim nolūkam tiek izmantots relejs minimālais spriegums. Tās dizains atgādina jebkuru elektromagnētisko releju, bet darbība šeit notiek, kad spoles magnetizācija samazinās un armatūra ar kontaktu sistēmu nokrīt no tās.
Īpašu vietu elektrisko instalāciju aizsardzības shēmās ieņem laika stafete. Ir gan elektromehāniskie, gan elektroniskie laika releji.
Apskatīsim EV tipa laika releja konstrukciju (8.4.8. att.).

Galvenais releja bloks ir pulksteņa mehānisms 2, ko iedarbina elektromagnētiskā sistēma 1. Releja spole ir savienota ar strāvas ķēdi un, kad tā tiek iedarbināta, tiek iedarbināts pulksteņa mehānisms. Pēc noteikta laika releja kontakti aizvērsies un elektroinstalācija tiks atvienota no tīkla. Relejs ļauj to konfigurēt dažādiem darbības režīmiem.
IN pēdējie gadi plaši izplatījušās ierīces, kurās elektromagnētiskās un kontaktu sistēma apvienots vienā veselumā. Tie ir tā sauktie niedru slēdži (8.4.9. att.).

Divas vai trīs permaloy kontaktplāksnes tiek pielodētas noslēgtā kolbā, kas piepildīta ar inertu gāzi. Paši kontakti (izgatavoti no zelta vai sudraba) atrodas plākšņu brīvajos galos. Kad pastāvīgais magnēts vai spole ar strāvu tuvojas niedru slēdzim, kontakti tiks aizvērti vai atvērti.
Saistībā ar radioelektronikas attīstību automātiskās vadības sistēmas ir papildinātas ar vairākām bezkontakta loģikas elementi. Informācijas pārsūtīšanu un pārveidošanu no sensora uz izpildmehānismu var veikt, vienkārši nošķirot divus signāla līmeņus (divas vērtības), no kuriem katrs var atbilst, piemēram, simboliem 0 un 1 vai patiesības jēdzieniem. "Jā un nē". Šajā gadījumā signālam jebkurā brīdī ir viena no divām iespējamām vērtībām, un to sauc par bināro signālu.
8.5. AUTOMĀTISKĀS VADĪBAS PRINCIPI UN SHĒMAS
8.5.1. VADĪBAS PRINCIPI
Automātiskās vadības princips ir tāds, ka bez cilvēka iejaukšanās tiek veiktas stingras un secīgas darbības elektroiekārtu ieslēgšanai un izslēgšanai, kā arī atbilstība noteiktajam darba režīmam.
Ir divu veidu vadība: pusautomātiska un automātiska. Plkst daļēji automātiskā vadība
operators veic objekta sākotnējo palaišanu (nospiežot pogu, pagriežot pogu utt.). Nākotnē tās funkcijas tiek samazinātas tikai līdz procesa gaitas uzraudzībai. Plkst automātiskā vadība pat sākotnējo impulsu instalācijas ieslēgšanai sūta sensors vai relejs. Instalācija darbojas pilnībā automātiskais režīms saskaņā ar doto programmu.
Programmatūras ierīci var izgatavot gan uz elektromehānisko elementu bāzes, gan izmantojot loģiskās shēmas.
8.5.2. VADĪBAS ĶĒNE
Šeit ir vairākas praksē bieži sastopamas elektromotora vadības shēmas.
Vienkāršākais no tiem ir vadības ķēde asinhronam trīsfāzu motoram, izmantojot magnētisko meklētāju.
Nospiežot pogu "Start", elektromagnēta spole ir savienota ar tīklu. Kustīgā armatūra saskarsies ar spoles serdi un ar savu kustību aizvērs strāvas kontaktus, kas elektromotoram piegādā trīsfāžu spriegumu. Vienlaikus ar jaudīgajiem aizveras arī bloķējošie kontakti, kas apiet pogu “Start”, kas ļauj to atbrīvot. Nospiežot pogu “Stop”, elektromagnēta spoles barošanas ķēde tiek pārrauta un armatūra, atbrīvojusies, nokrīt, tādējādi atverot strāvas kontaktus. Elektromotors apstāsies.
Elektromotora aizsardzību no ilgstošas pārslodzes šeit nodrošina divi termoreleji RT, kas savienoti divās fāzēs. Termoreleju PT1 un PT2 atvienojošie kontakti tiek ievadīti elektromagnēta spoles strāvas ķēdē.

Reversās motora vadībai tiek izmantota ķēde ar diviem magnētiskajiem starteriem (8.5.2.2. att.).
Viens magnētiskais starteris pārslēdz motora pārslēgšanas ķēdi griešanai uz priekšu, bet otrs - atpakaļgaitā.
Pogas “uz priekšu” un “atpakaļ” attiecīgi savieno spoles, un poga “Stop” un termiskā releja izslēgšanas kontakti ir iekļauti kopējā vadības ķēdē.
Elektromotori, kas pārvērš elektrisko enerģiju mehāniskajā enerģijā, rada rotācijas kustību; ievērojamai daļai darbgaldu ir arī rotējošas darba daļas; Tāpēc šķiet lietderīgi vispirms atvasināt kustības vienādojumu šim gadījumam rotācijas kustība.
Saskaņā ar rotējoša ķermeņa dinamikas pamatlikumu momentu vektora summa, kas darbojas attiecībā pret griešanās asi, ir vienāda ar leņķiskā impulsa atvasinājumu:
Elektriskās piedziņas sistēmās galvenais darbības režīms ir elektriskā mašīna ir motors. Šajā gadījumā pretestības momentam ir bremzēšanas raksturs attiecībā pret rotora kustību un tas iedarbojas uz motora griezes momentu. Tāpēc tiek pieņemts, ka pretestības griezes momenta pozitīvais virziens ir pretējs motora griezes momenta pozitīvajam virzienam, kā rezultātā vienādojums (5.1) tiek uzrakstīts šādi:
![]() (5.2)
(5.2)
Piedziņas kustības vienādojums (5.2.) parāda, ka dzinēja radītais griezes moments ir līdzsvarots ar pretestības momentu uz tā vārpstu un inerciālo jeb dinamisko griezes momentu. Kur ω - šīs saites leņķiskais ātrums, rad/s.
Ņemiet vērā, ka leņķiskais ātrums (rad/s) ir saistīts ar griešanās ātrumu n (apgr./min) ar attiecību

(5.2.) vienādojumā pieņemts, ka piedziņas inerces moments ir nemainīgs, kas attiecas uz ievērojamu skaitu ražošanas mehānismu. Šeit momenti ir algebriski, nevis vektoru lielumi, jo abi momenti darbojas attiecībā pret vienu un to pašu rotācijas asi. Labā puse Vienādojumus (5.2) sauc par inerciālo (dinamisko) momentu (), t.i.
Šis brīdis parādās tikai pārejas režīmos, kad mainās braukšanas ātrums. No (5.3) izriet, ka dinamiskā griezes momenta virziens vienmēr sakrīt ar elektriskās piedziņas paātrinājuma virzienu. Atkarībā no dinamiskā griezes momenta zīmes izšķir šādus elektriskās piedziņas darbības režīmus:
1), t.i. , disks paātrina pie , un disks palēninās pie .
2), t.i. , disks palēninās pie , un paātrina pie .
3) , t.i. , šajā gadījumā piedziņa darbojas līdzsvara stāvoklī, t.i. .
Zīmju izvēle griezes momenta vērtību priekšā ir atkarīga no dzinēja darbības režīma un pretestības griezes momentu rakstura.
Kopā ar sistēmām, kurās ir tikai elementi, kas atrodas rotācijas kustība, dažreiz nākas saskarties ar sistēmām virzās pakāpeniski. Šajā gadījumā momentu vienādojuma vietā ir jāņem vērā spēku vienādojums, kas iedarbojas uz sistēmu.
Translācijas kustības laikā dzinējspēks vienmēr tiek līdzsvarots ar mašīnas pretestības spēku un inerces spēku, kas rodas, mainoties ātrumam. Ja ķermeņa masu izsaka kilogramos un ātrumu metros sekundē, tad inerces spēku, tāpat kā citus spēkus, kas darbojas darba mašīnā, mēra ņūtonos ().
Saskaņā ar iepriekš minēto spēku līdzsvara vienādojumu translācijas kustības laikā raksta šādi:
![]() . (5.4)
. (5.4)
(5.4) tiek pieņemts, ka ķermeņa masa ir nemainīga, kas attiecas uz ievērojamu skaitu ražošanas mehānismu.
Elektriskā piedziņas kustības pamatvienādojums.
Elektromehāniskajai sistēmai jaudas bilances nosacījumam jābūt izpildītam jebkurā laikā:
Kur  - jauda, ko dzinējs piegādā vārpstai;
- jauda, ko dzinējs piegādā vārpstai;
 - statiskās pretestības spēku jauda;
- statiskās pretestības spēku jauda;
 - dinamiska jauda, iet, lai mainītu kinētisko enerģiju
- dinamiska jauda, iet, lai mainītu kinētisko enerģiju  procesos, kuros mainās dzinēja apgriezieni.
procesos, kuros mainās dzinēja apgriezieni.
Savukārt kinētiskās enerģijas vienādojums tiks uzrakstīts:

Vai dinamiskai jaudai:

Ja  Un
Un  mainoties laika gaitā, mēs iegūstam:
mainoties laika gaitā, mēs iegūstam:

Pielīdzinot jaudas vērtības, mēs iegūstam:

Šī atkarība ir elektriskās piedziņas kustības vienādojums. Lielākajai daļai mehānismu  . Tad vienādojumam būs šāda forma:
. Tad vienādojumam būs šāda forma:

Analizēsim šo vienādojumu:

Elektriskās piedziņas kustības pamatvienādojums ir visu inženiertehnisko aprēķinu pamatā. Pamatojoties uz to, tiek veikti aprēķini, piemēram, motora diagramma, tiek izvēlēts motors, tiek aprēķināti palaišanas griezes momenti un strāvas, kā arī tiek novērtēta elektriskās piedziņas dinamika.
Pamatjēdzieni par elektriskās piedziņas stabilitāti.
Elektriskās piedziņas stabilitāti nosaka, salīdzinot motora mehāniskos raksturlielumus un izpildmehānisma mehāniskos raksturlielumus (  Un
Un  ). Apskatīsim asinsspiediena piemēru.
). Apskatīsim asinsspiediena piemēru.

Apskatīsim trīs izpildmehānismu mehāniskos raksturlielumus:

Šajā režīmā dzinējs pārvar slodzes griezes momentu un mehānisko zudumu griezes momentu. Darbības režīms ir stabils.

Šajā režīmā mums ir divi krustošanās punkti (2 un 3). Ātrums ir ilgtspējīgs  . Jo nelielu novirzi apgriezienos kompensē pretējās zīmes (wMiliwM) griezes momenta maiņa.
. Jo nelielu novirzi apgriezienos kompensē pretējās zīmes (wMiliwM) griezes momenta maiņa.
3. punktam wM.
Elektriskās piedziņas iedarbināšanas un palēninājuma laika noteikšana
Sākuma laiku var noteikt, pamatojoties uz elektriskās piedziņas kustības pamata vienādojumu:
 .
.
Izolēsim laika komponentu no šī vienādojuma:
 ;
;
Integrējot šo izteiksmi, mēs iegūstam:
 .
.
Šis vienādojums nosaka ātruma pieauguma laiku no 0 līdz galīgajam (vienmērīgajam) ātrumam.
Bremzēšanas laiku var aprēķināt, izmantojot šādu formulu:

Elektriskās piedziņas termiskie darbības režīmi. Elektromotora jaudas aprēķināšanas un izvēles iezīmes dažādos termiskajos apstākļos.
Elektriskās mašīnas darbības režīms ir noteikta mainīgu periodu secība, ko raksturo slodzes lielums un ilgums, izslēgšanas, bremzēšanas, iedarbināšanas un atpakaļgaitas darbības laikā.
1. Garais režīmsS1
– pie nemainīgas nominālās slodzes  dzinējs darbojas tik ilgi, ka visu tā daļu pārkaršanas temperatūra spēj sasniegt līdzsvara stāvokļa vērtības
dzinējs darbojas tik ilgi, ka visu tā daļu pārkaršanas temperatūra spēj sasniegt līdzsvara stāvokļa vērtības  . Ir nepārtraukti režīmi pastāvīga slodze(1. attēls) un ar mainot slodzi(2. attēls).
. Ir nepārtraukti režīmi pastāvīga slodze(1. attēls) un ar mainot slodzi(2. attēls).
2. Īstermiņa režīmsS2
– kad nemainīgas nominālās slodzes periodi mijas ar dzinēja izslēgšanas periodiem (3. attēls). Šajā gadījumā dzinēja darbības periodi  tik īss, ka visu dzinēja daļu sildīšanas temperatūra nesasniedz līdzsvara stāvokļa vērtības, un dzinēja izslēgšanas periodi ir tik ilgi, ka visām dzinēja daļām ir laiks atdzist līdz apkārtējās vides temperatūrai. Standarts nosaka slodzes periodu ilgumu 10, 30, 60 un 90 minūtes. Īstermiņa režīma simbols norāda slodzes perioda ilgumu, piemēram, S2 - 30 minūtes.
tik īss, ka visu dzinēja daļu sildīšanas temperatūra nesasniedz līdzsvara stāvokļa vērtības, un dzinēja izslēgšanas periodi ir tik ilgi, ka visām dzinēja daļām ir laiks atdzist līdz apkārtējās vides temperatūrai. Standarts nosaka slodzes periodu ilgumu 10, 30, 60 un 90 minūtes. Īstermiņa režīma simbols norāda slodzes perioda ilgumu, piemēram, S2 - 30 minūtes.
3. Intermitējošais režīms S3 – īslaicīgi dzinēja darbības periodi  pārmaiņus ar dzinēja izslēgšanas periodiem
pārmaiņus ar dzinēja izslēgšanas periodiem  , un darba laikā
, un darba laikā  temperatūras pieaugumam nav laika sasniegt līdzsvara stāvokļa vērtības, un pauzes laikā dzinēja daļām nav laika atdzist līdz apkārtējās vides temperatūrai. Kopējais darbības laiks intermitējošā režīmā ir sadalīts periodiski atkārtojošos ilguma ciklos
temperatūras pieaugumam nav laika sasniegt līdzsvara stāvokļa vērtības, un pauzes laikā dzinēja daļām nav laika atdzist līdz apkārtējās vides temperatūrai. Kopējais darbības laiks intermitējošā režīmā ir sadalīts periodiski atkārtojošos ilguma ciklos  .
.
Neregulāras darbības režīmā dzinēja apsildes grafiks izskatās kā zāģa zoba līkne (4. attēls). Kad dzinējs sasniedz vienmērīgu pārkaršanas temperatūras vērtību, kas atbilst neregulāram režīmam  ,dzinēja pārkaršanas temperatūra turpina svārstīties no
,dzinēja pārkaršanas temperatūra turpina svārstīties no  pirms tam
pirms tam  . Kurā
. Kurā  zemāka par noteikto pārkaršanas temperatūru, kas notiktu, ja dzinēja darbības režīms tiktu pagarināts (
zemāka par noteikto pārkaršanas temperatūru, kas notiktu, ja dzinēja darbības režīms tiktu pagarināts (  <
< ).
).
Intermitējošo režīmu raksturo relatīvais garumsiekļaušanas mūžs:  .
Pašreizējais standarts paredz nominālos neregulāros režīmus ar darba cikliem 15, 25, 40 un 60% (ilgtermiņa režīma darba ciklam = 100 %).
Intermitējošā režīma simbolā ir norādīta darba cikla vērtība, piemēram, S3-40%.
.
Pašreizējais standarts paredz nominālos neregulāros režīmus ar darba cikliem 15, 25, 40 un 60% (ilgtermiņa režīma darba ciklam = 100 %).
Intermitējošā režīma simbolā ir norādīta darba cikla vērtība, piemēram, S3-40%.
Izvēloties dzinēju, kura pasē norādīta jauda pie PV = 100%, pārrēķins jāveic, izmantojot formulu:
 .
.
Trīs aplūkotie nominālie režīmi tiek uzskatīti par pamata. Standarts nodrošina arī papildu režīmus:
intermitējošais režīms S4 ar biežiem iedarbinājumiem, ar palaišanas reižu skaitu stundā 30, 60, 120 vai 240;
periodisks S5 režīms ar biežu iedarbināšanu un elektrisko bremzēšanu katra cikla beigās;
kustības režīms S6 ar biežu atpakaļgaitu un elektrisko bremzēšanu;
kustības režīms S7 ar biežu iedarbināšanu, atpakaļgaitu un elektrisko bremzēšanu;
kustības režīms S8 ar diviem vai vairākiem dažādiem ātrumiem;

 1. attēls 2. attēls
1. attēls 2. attēls


3. attēls 4. attēls
| " |