Neile, kes soovivad mõista, mida ratta joondusnurgad (Camber / Toe) tähendavad, ja mõistavad probleemi põhjalikult, on selles artiklis vastused kõigile küsimustele.
Ajaloost kõrvalekaldumine näitab, et ammu enne auto tulekut kasutati erinevatel sõidukitel keerukat ratta joondamist. Siin on mõned enam-vähem tuntud näited.
Pole saladus, et mõne dünaamiliseks sõitmiseks mõeldud hobuvankrite ja teiste hobuvankrite rattad paigaldati silmale selgelt nähtava suure positiivse tõusuga. Seda tehti nii, et ratastelt lendav muda ei kukkunud vankrisse ja tähtsatesse sõitjatesse, vaid puistati külgedele laiali.Utiliteedi kärude jaoks rahulikuks liikumiseks oli kõik täpselt vastupidi. Seega soovitati revolutsioonieelsetes juhistes hea käru ehitamiseks paigaldada negatiivse kaldega rattad. Sel juhul, kui ratast lukustanud tüübel kaotas, ei hüpanud see kohe teljest maha. Autojuhil oli aega märgata eriti suurte muredega varustatud "veermiku" kahjustusi mitmekümne käru jahu olemasolu korral kärus ja tungraua puudumisel. Relvavankrite kujundamisel (jällegi vastupidi) kasutati mõnikord positiivset tõusu. On selge, et mitte relva mustuse eest kaitsmiseks. Nii oli sulastel mugav käte abil külgedelt relv üle rataste veeretada, kartmata jalgade purustamist. Kuid vankri juures kallutati selle tohutud rattad, mis aitasid kraavidest hõlpsasti üle saada, teises suunas - vankri poole. Sellest tulenev rööpmelaiuse suurenemine aitas kaasa Kesk-Aasia "mobiiltelefoni" stabiilsuse suurenemisele, mida eristas kõrge raskuskese. Kuidas on need ajaloolised faktid seotud rataste paigaldamisega? kaasaegsed autod? Jah, üldiselt mitte ühtegi. Sellest hoolimata annavad need kasuliku järelduse. On näha, et rataste (eriti nende kõveruse) paigaldamine ei allu ühele korrapärasusele.
Selle parameetri valimisel juhindus tootja igal juhul erinevatest kaalutlustest, mida ta pidas esmatähtsaks. Niisiis, mille poole konstruktorid püüdlevad auto vedrustus valides UUK? Muidugi ideaalini. Sirgjoonel liikuva auto jaoks on ideaalne rataste asend, kui nende pöörlemistasandid (veerevat tasapinda) on teepinnaga risti, üksteisega paralleelselt, kere sümmeetriatelgedega ja langevad kokku liikumistrajektooriga. Sellisel juhul on rehvi turvise hõõrdumisest ja kulumisest tulenev võimsuse kadu minimaalne ning rataste haardumine teega on vastupidi maksimaalne. Loomulikult tekib küsimus: mis paneb teid tahtlikult ideaalist kõrvale kalduma? Tulevikku vaadates on mitu kaalutlust. Esiteks hindame ratta joondamist staatilise pildi põhjal, kui sõiduk seisab. Kes ütles, et liikudes see auto muutmisel kiirendamisel, pidurdamisel ja manööverdamisel ei muutu? Teiseks ei ole kadude vähendamine ja rehvide eluea pikendamine alati prioriteet. Enne kui räägime sellest, milliseid tegureid vedrustuse arendajad arvestavad, lepime kokku, et auto vedrustuse geomeetriat kirjeldavate suurte parameetrite hulgast piirdume ainult nendega, mis kuuluvad põhi- või põhirühma. Neid kutsutakse nii, kuna need määravad suspensiooni häälestuse ja omadused, jälgitakse selle diagnoosimise ajal alati ja neid kohandatakse võimaluse korral. Need on roolitelje tuntud varba-, nurga- ja kaldenurgad. Nende kriitiliste parameetrite kaalumisel peame meeles pidama vedrustuse muid omadusi.
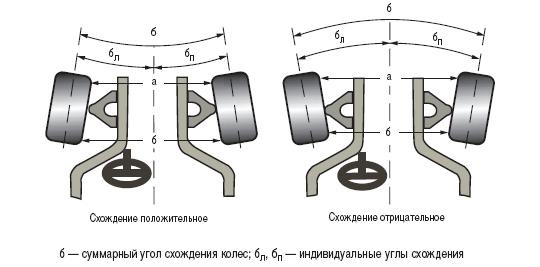
Toe-in (TOE) iseloomustab rataste suunda sõiduki pikitelje suhtes. Iga ratta positsiooni saab määrata teistest eraldi ja siis räägitakse individuaalsest lähenemisest. See on nurk ratta pöörlemistasandi ja sõiduki telje vahel ülalt vaadatuna. Ühe telje rataste täielik lähenemine (või lihtsalt lähenemine). nagu nimigi ütleb, on üksikute nurkade summa. Kui rataste pöörlemistasandid ristuvad auto ees, on varba sisselülitamine positiivne (varba sisse), kui taga - negatiivne (varba välja). Viimasel juhul võime rääkida rataste joondamisest.
Kohandamisandmetes antakse mõnikord lähenemine mitte ainult nurga, vaid ka lineaarse väärtuse kujul. See on tingitud asjaolust. et rataste varbaosa saab otsustada ka veljeäärikute vaheliste kauguste erinevuse järgi, mõõdetuna nende telgede keskel telje taga ja ees.
Erinevates allikates, sealhulgas tõsises tehnilises kirjanduses, tuuakse sageli välja versioon, et ratta joondamine on vajalik kumeruse kõrvaltoimete kompenseerimiseks. Nad ütlevad, et rehvi deformatsiooni tõttu kontaktplaastris võib "kokku kukkunud" ratast kujutada koonuse alusena. Kui rattad on paigaldatud positiivse kaldenurgaga (miks see pole veel oluline), kipuvad need "välja veerema" eri suundades. Selle vastu võitlemiseks viiakse rataste pöörlemistasandid kokku. (Joonis 20)
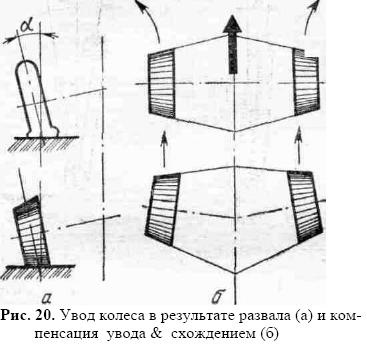
Pean ütlema, et versioon pole elegantseta, kuid ei kannata kriitikat. Juba ainuüksi seetõttu, et see eeldab üheselt mõistetavat suhet kokkuvarisemise ja lähenemise vahel. Kavandatava loogika kohaselt tuleb negatiivse kaldenurgaga rattad paigaldada lahknevustega ja kui nurgenurk on , siis ei tohiks varba olla. Tegelikkuses pole see sugugi nii.
Reaalsus, nagu tavaliselt, allub keerukamatele ja mitmetähenduslikumatele mustritele. Kui kallutatud ratas veereb, on kontaktplaastris tegelikult külgjõud, mida sageli nimetatakse kõverjõuks. See tuleneb rehvi elastsest deformatsioonist külgsuunas ja toimib nõlva suunas. Mida suurem on ratta kalle nurk, seda suurem on kaamera tõukejõud. Just seda kasutavad kaherattaliste sõidukite - mootorrataste ja jalgrataste - juhid kurvides. Piisab sellest, kui nad kallutavad oma hoogu, et panna see "ette kirjutama" kõverat trajektoori, mida saab parandada ainult roolimehhanismi abil. Camberi tõukejõul on oluline roll ka sõidukite manööverdamisel, mida käsitletakse allpool. Seega on ebatõenäoline, et seda peaks tahtlikult kompenseerima lähenemisega. Ja sõnum iseenesest on see, et positiivse kaldenurga tõttu kipuvad rattad pöörama väljapoole, s.t. lahknevuse suunas, on vale. Vastupidi, rooliratta vedrustuse konstruktsioon on enamikul juhtudel selline, et positiivse kõveruse korral kipub selle tõukejõud suurenema. Nii et "kõveruse kõrvaltoimete kompenseerimisega" pole midagi pistmist. Mõju olemus ja sügavus (ja seega ka tulemus) sõltub paljudest asjaoludest: veoratas või vabalt veerev, reguleeritav suspensiooni kinemaatika ja elastsuse põhjal või mitte. Seega mõjub veeretakistusjõud vabalt veerevale autorattale pikisuunas. See loob paindemomendi, mis kaldub pöörama ratast vedrustuse kinnituskohtade suhtes lahknemise suunas. Kui peatamine auto karm (näiteks mitte lõhestatud või torsioonkiir), siis pole mõju eriti märkimisväärne. Sellest hoolimata on see kindlasti nii, sest "absoluutne jäikus" on puhtalt teoreetiline termin ja nähtus. Lisaks sellele ei määra ratta liikumist mitte ainult vedrustuselementide elastne deformatsioon, vaid ka nende liigeste, ratta laagrite jne konstruktsioonivahede kompenseerimine.
Suure paindlikkusega vedrustuse korral (mis on tüüpiline näiteks elastsete puksidega kangistruktuuride puhul) kasvab tulemus mitu korda. Kui ratas ei ole mitte ainult vaba veerema, vaid ka juhitav, muutub olukord keerulisemaks. Täiendava vabadusastme ilmumise tõttu roolis on sama takistusjõuga topeltmõju. Esivedrustuses painduvat hetke täiendab hetk, mis kipub ratast ümber roolitelje keerama. Pöördemoment, mille suurus sõltub pöördtelje asendist, mõjutab roolimehhanismi osi ja annab tänu nende nõtkusele olulise panuse ka ratta varba muutmisse liikumisel. Sõltuvalt sissetunginud õlast võib tagurdusmomendi panus olla pluss- või miinusmärgiga. See tähendab, et see võib rataste joondamist kas suurendada või sellele vastu tulla. Kui te seda kõike arvesse ei võta ja paigaldate esialgu nullvarvasega rattad, võtavad nad liikumisel lahkneva positsiooni. See "voolab" tagajärgi, mis on tüüpilised varbakinnituse rikkumise juhtumitele: suurenenud tarbimine kütus, saehamba turvise kulumine ja käsitsemisprobleemid, millest räägitakse hiljem.
Liikumiskindlus sõltub sõiduki kiirusest. seega ideaalne lahendus oleks varba varieeruv, pakkudes rataste sama ideaalset asendit igal kiirusel. Kuna seda on raske teha, on ratas esialgu "vähendatud", et saavutada rehvis minimaalne kulumine reisikiirus... Veoteljel asuvale rattale avaldatakse suurema osa ajast veojõudu. See ületab liikumisele vastupanu tekitavaid jõude, seega suunatakse jõudude tulemus liikumise suunas. Rakendades sama loogikat, saame, et sel juhul tuleb staatikas olevad rattad seada lahknevusega. Sarnase järelduse võib teha ka juhitavate veorataste osas.
Parim tõe kriteerium on praktika. Kui seda silmas pidada, vaatate tänapäevaste autode reguleerimisandmeid, võite pettuda, kui ei leidnud tagumiste ja esiveoliste mudelite vaheliste rataste joondamisel palju erinevusi. Enamasti on see parameeter nii nendel kui teistel positiivne. Välja arvatud esiveoliste autode seas, on "neutraalse" varba reguleerimise juhtumid tavalisemad. Põhjus pole selles, et ülaltoodud loogika ei oleks õige. Lihtsalt lähenemise väärtuse valimisel võetakse koos pikijõudude kompenseerimisega arvesse ka muid kaalutlusi, mis muudavad lõpptulemust. Üks olulisemaid on sõiduki optimaalse juhitavuse tagamine. Koos kiiruste ja sõidukite dünaamika kasvuga muutub see tegur üha olulisemaks.
Juhitavus on mitmetahuline kontseptsioon, mistõttu tasub selgitada, et ratta joondamine mõjutab kõige enam auto sirgjoonelise trajektoori stabiliseerumist ja käitumist pöörde sissepääsu juures. Seda mõju saab selgitada juhtrataste näitel.

Oletame, et ühel neist sirgjooneliselt liikudes tekib tee ebatasasustest juhuslik häire. Suurenenud pidurdusjõud pöörab ratta varba languse suunas. Roolimehhanismi kaudu kandub löök teisele rattale, mille lähenemine vastupidi suureneb. Kui esialgu on ratastel positiivne sisselõige, siis esimesel väheneb takistusjõud ja teisel suureneb, mis neutraliseerib häire. Kui lähenemine on , ei ole vastumeelset mõju ja kui see on negatiivne, ilmub destabiliseeriv moment, mis aitab kaasa nördimuse arengule. Sellise varba reguleerimisega auto uurib teed, seda tuleb pidevalt rooliga kinni püüda, mis on tavalise maanteesõiduki jaoks vastuvõetamatu.
Sellel "mündil" on negatiivne külg, positiivne külg - negatiivne varvas võimaldab teil saada roolist kõige kiiremat vastust. Juhi vähimgi tegevus kutsub kohe esile trajektoori järsu muutuse - auto manööverdab meelsasti, "lepib" kergelt ümber. Seda varba reguleerimist kasutatakse autospordis kogu aeg.

Need, kes vaatavad WRC meistrivõistluste telesaateid, on ilmselt pööranud tähelepanu sellele, kui aktiivselt sama Loeb või Grönholm peavad roolis töötama ka suhteliselt sirgetel rajalõikudel. Tagatelje varbakinnitusel on sarnane mõju auto käitumisele - varba sisselülitamise vähendamine kuni väikese lahknevuseni suurendab telje "liikuvust". Seda efekti kasutatakse sageli alajuhitamise kompenseerimiseks sõidukites, näiteks esisillaga esivedu.
Seega kujutavad reguleerimisandmetes toodud staatilised varba sisselülitamise parameetrid omamoodi superpositsiooni ja mõnikord kompromissi soovis säästa kütust ja kummi ning saavutada auto jaoks optimaalsed juhitavuse omadused. Pealegi on märgatav, et viimastel aastatel on see valdav olnud.
Camber on parameeter, mis vastutab ratta orientatsiooni suhtes teekate... Mäletame, et ideaalis peaksid need olema üksteisega risti, s.t. kokkuvarisemist ei tohiks olla. Kuid enamus maanteesõiduautod ta on. Mis trikk on?
Viide.
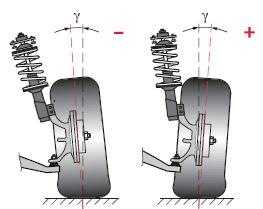
Camber peegeldab ratta suunda vertikaali suhtes ja on määratletud kui nurk vertikaalse ja ratta pöörlemistasandi vahel. Kui ratas on tegelikult “katki”, s.t. selle ülaosa on väljapoole kaldu, kumerust peetakse positiivseks. Kui ratas on kere poole kallutatud, on tõusuklapp negatiivne.
Kuni viimase ajani kiputi rattaid lõhkuma, s.t. andke nurgenurkadele positiivsed väärtused. Paljud mäletavad kindlasti auto teooria õpikuid, kus kumerate rataste paigaldamist seletati sooviga koormus ümber jaotada välise ja sisemise vahel rattalaagrid... Sarnaselt positiivse kallutusnurgaga langeb suurem osa sellest sisemisele laagrile, mida on lihtsam muuta massiivsemaks ja vastupidavamaks. Selle tulemusena on laagrisõlme vastupidavus kasulik. Lõputöö ei ole eriti veenev juba sellepärast, et kui see on tõsi, siis ainult ideaalse olukorra - auto sirgjoonelise liikumise jaoks absoluutselt tasasel teel. On teada, et manöövrite ja sõidurikkumiste ajal, isegi kõige väiksemad, laagrisõlm läbib dünaamilisi koormusi, mis on staatilistest jõududest suurusjärgus suuremad. Ja need ei ole jaotatud täpselt nii, nagu positiivne tõus on "dikteeritud".
Mõnikord püüavad inimesed tõlgendada positiivset tõusu täiendava meetmena, mille eesmärk on vähendada sissemurdmist. Kui me tutvume selle rooliratta vedrustuse olulise parameetriga, selgub, et see mõjutamismeetod pole kaugeltki kõige edukam. Sellega on ühendatud rööbastee laiuse ja ratta telje kaasatud kaldenurga samaaegne muutus, mis on täis soovimatuid tagajärgi. Sissemurdmise õla muutmiseks on sirgemad ja vähem valusad võimalused. Pealegi pole selle minimeerimine alati vedrustuse disainerite eesmärk.
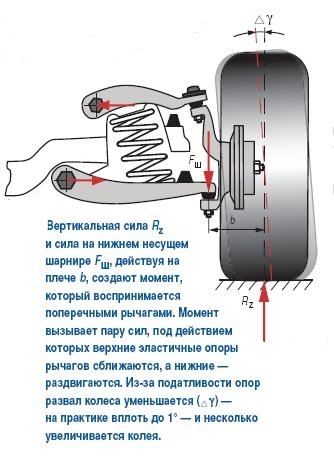
Veenvam versioon on see, et positiivne tõus kõverdab rataste nihke, mis tekib teljekoormuse suurenemisel (auto koormuse suurenemise või selle massi dünaamilise ümberjaotamise tulemusena kiirendamisel ja pidurdamisel). Enamiku tänapäevaste vedrustustüüpide elasto-kinemaatilised omadused on sellised, et ratta massi suurenemisega langeb kaldenurk. Selleks, et tagada rataste maksimaalne haardumine teega, on loogiline neid eelnevalt veidi "lõhkuda". Pealegi on mõõdukate annuste korral kumerusel veeretakistust ja rehvide kulumist vähe.
Usaldusväärselt on teada, et tõusu väärtuse valikut mõjutab ka sõidutee üldtunnustatud profileerimine. Tsiviliseeritud riikides, kus on teed, mitte suunad, on nende ristlõige kumera profiiliga. Selleks, et ratas jääks sel juhul risti tugipinnaga, tuleb sellele anda väike positiivne nurk kokku kukkuma.
UCC spetsifikatsioone vaadates võib märgata, et viimastel aastatel on valitsenud vastupidine "lagunemistrend". Enamiku tootmissõidukite rattad on paigaldatud staatilisse asendisse negatiivse kaldega. Fakt on see, et nagu juba mainitud, tuleb esile ülesanne tagada nende parim stabiilsus ja juhitavus. Camber on parameeter, mis mõjutab otsustavalt rataste nn külgmist reaktsiooni. See on tema, kes võtab vastu kurvis autole mõjuvaid tsentrifugaaljõude ja aitab hoida seda kõveral trajektooril. Üldistest kaalutlustest järeldub, et ratta haardumine (külgmine reaktsioon) on maksimaalne kokkupuuteplatsi suurimal alal, s.t. kui ratas on vertikaalasendis. Tegelikult tipneb see ratta standardse konstruktsiooni korral väikeste negatiivsete kallutusnurkadega, mis tuleneb mainitud kõveruse tõukejõust. See tähendab, et selleks, et auto rattad oleksid pöördes ülimalt visad, ei pea te neid lõhkuma, vaid vastupidi, neid "maha kallama". See efekt on teada juba pikka aega ja seda on autospordis kasutatud sama kaua. "Formula" autot lähemalt uurides on selgelt näha, et selle esirattad on paigaldatud suure negatiivse kaldega.

Milleks hea võidusõiduautod, mis pole päris sobiv sõidukitele. Liigne negatiivne kõverus põhjustab turvise sisemise ala suuremat kulumist. Ratta kalde suurenemise korral väheneb kontaktplaastri pindala. Ratta haardumine sirgjoonelise liikumise ajal väheneb omakorda kiirenduse ja pidurdamise efektiivsus. Liigne negatiivne kõverus mõjutab auto võimet sirget hoida samamoodi nagu ebapiisav varvas, auto muutub tarbetult närviliseks. Selles on süüdi sama tõukejõud. Ideaalses olukorras mõjuvad kumeruse põhjustatud külgmised jõud telje mõlemale rattale ja tasakaalustavad üksteist. Kuid niipea, kui üks ratastest haarde kaotab, on teise ratta tõukejõud kompenseerimata ja sunnib autot sirgjoonelt kõrvale kalduma. Muide, kui meenutada, et tõukejõu suurus sõltub ratta kaldest, pole auto külgsuunalist triivi paremate ja vasakute rataste ebavõrdsete nurgenurkadega keeruline seletada. Lühidalt öeldes peate kaamerasumma valimisel otsima ka "kuldset keskteed".
Sõiduki hea stabiilsuse tagamiseks ei piisa staatikas kaldenurkade muutmiseks negatiivseks. Vedrustuse projekteerijad peavad tagama, et rattad püsiksid optimaalses või peaaegu optimaalses suunas kõikides sõidutingimustes. Seda pole lihtne teha, sest manöövrite ajal põhjustavad kõik keha asukoha muutused koos vedrustuselementide nihutamisega (nokitsused, külgmised rullid jms) kumerus olulise muutuse. Kummalisel kombel on seda probleemi lihtsam lahendada sportautod nende "raevukate" suspensioonidega, mida iseloomustab kõrge nurkjäikus ja lühikesed löögid. Siin erinevad kumeruse (ja varba) staatilised väärtused kõige vähem sellest, kuidas nad dünaamikas välja näevad.

Mida suurem on vedrustuse liikumisulatus, seda suurem on kaamera liikumise muutus. Seetõttu on kõige elastsemate (parima mugavuse tagamiseks) vedrustusega tavaliste maanteesõidukite arendajatele kõige raskem. Nad peavad nuputama, kuidas "kokkusobimatut ühendada" - mugavus ja stabiilsus. Tavaliselt võib kompromissi leida suspensiooni kinemaatika üle "lummates".
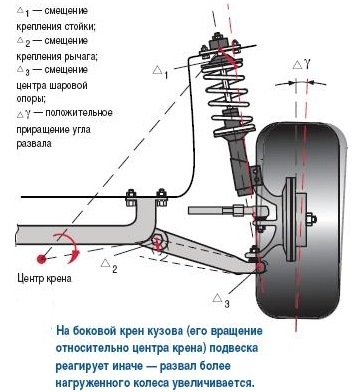
On olemas lahendusi, et minimeerida muutusi ja anda neile soovitud trend. Näiteks on soovitav, et nurgas jääks kõige koormatum välimine ratas samasse optimaalsesse asendisse - kerge negatiivse kaldega. Selleks peaks kere veeredes ratas selle peal veelgi "üle veerema", mis saavutatakse vedrustuse juhtelementide geomeetria optimeerimisega. Lisaks püüavad nad kererullide abil ise kererulli vähendada.
On õiglane öelda, et vedrustuse elastsus pole alati stabiilsuse ja juhitavuse vaenlane. AT " head käed»Elastsus vastupidi soodustab neid. Näiteks tagatelje rataste "isejuhtimise" efekti oskusliku kasutamisega. Naastes jututeema juurde, võime kokku võtta, et nurgenurgad, mis on näidatud spetsifikatsioonides sõiduautodmobiiliderinevad oluliselt sellest, kuidas nad osutuvad.
Täiendades "lahtivõtmist" varba ja kumerusega, võime mainida veel ühte huvitavat aspekti, millel on praktiline tähendus. UUK-i korrigeerimisandmetes ei ole toodud kumeruse ja varba nurkade absoluutväärtused, vaid lubatud väärtuste vahemikud. Varba tolerantsid on jäigemad ega ületa tavaliselt ± 10 ", kõveruse korral - mitu korda rohkem vaba (keskmiselt ± 30"). See tähendab, et ACC-d reguleeriv kapten saab vedrustust häälestada ilma tehase spetsifikatsioonidest väljapoole minemata. Tundub, et mitukümmend kaareminutit on jama. Ajasin parameetrid "rohelisse koridori" - ja tellin. Kuid vaatame, mis tulemus võib olla. Näiteks BMW 5. seeria spetsifikatsioonid E39 keres näitavad: varba sisse 0 ° 5 "± 10", kaldu -0 ° 13 "± 30". See tähendab, et "rohelises koridoris" püsides võib lähenemise väärtus olla vahemikus –0 ° 5 ”kuni 5” ja nurgast –43 ”kuni 7”. See tähendab, et nii varvas kui ka kõverus võivad olla negatiivsed, neutraalsed või positiivsed. Võttes ettekujutuse varba ja kõveruse mõjust auto käitumisele, võite soovitud tulemuse saamiseks need parameetrid teadlikult "šamaani" teha. Mõju ei ole dramaatiline, kuid kindlasti.
Kõver ja varvas, mida oleme arvestanud, on parameetrid, mis määratakse kindlaks kõigi auto nelja ratta jaoks. Järgmisena räägime nurgaomadustest, mis on seotud ainult juhitavate ratastega ja määravad nende pöörlemistelje ruumilise orientatsiooni.
On teada, et auto rooli rooli telje asukoht määratakse kahe nurga all: piki- ja põikisuunaga. Miks mitte muuta pöördtelg rangelt vertikaalseks? Erinevalt kokkuvarisemise ja lähenemisega juhtudest on vastus sellele küsimusele üheselt mõistetav. Siinkohal on erinevad allikad vähemalt ratta nurga osas peaaegu üksmeelsed.

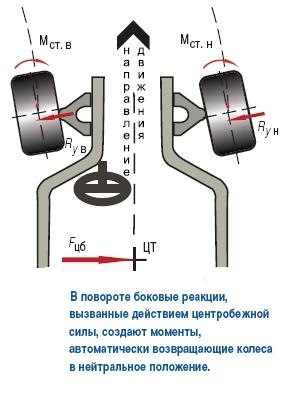
On üsna märgitud, et ratta põhiülesanne on auto roolide kiire (või dünaamiline) stabiliseerimine. Sel juhul on stabiliseerimine juhitavate rataste võime vastu seista neutraalsest kõrvalekaldest (vastav sirge liikumine) asend ja naaseb selle juurde automaatselt pärast kõrvalekalde põhjustanud väliste jõudude tegevuse lõpetamist. Tugijõud mõjutavad pidevalt liikuvat autoratast, püüdes selle neutraalsest asendist välja tuua. Need võivad olla tingitud mööduvate teerikkumistest, rataste tasakaalustamatusest jne. Kuna häirete suurus ja suund muutuvad pidevalt, on nende mõju juhusliku võnkumisega. Ilma stabiliseerimismehhanismita peaks juht vibratsioone tõrjuma, mis muudaks sõitmise piinavaks ja tõenäoliselt suurendaks rehvide kulumist. Nõuetekohase stabiliseerumise korral liigub sõiduk juhi minimaalse sekkumisega ühtlaselt sirgjooneliselt ja isegi vabastatud rooliga.
Juhitavate rataste läbipainde põhjuseks võib olla juhi tahtlik tegevus, mis on seotud sõidusuuna muutumisega. Sellisel juhul aitab stabiliseeriv efekt juhi kurvist välja, tagastades rattad automaatselt neutraalasendisse. Kuid pöörde sissepääsu juures ja tipus peab “juht” vastupidi ületama rataste “vastupanu”, rakendades roolile teatavat pingutust. Roolil tekkiv reaktiivjõud loob nn roolitunnetuse või rooliteabe, millele on nii autodisainerid kui ka autoajakirjanikud pööranud palju tähelepanu.
3 aastat
Ratta joondamine mängib sõiduki töös olulist rolli - nõuetekohase jälgimise korral võivad need pikendada erinevate komponentide eluiga ja parandada sõidumugavust. Kuid samas ei saa paljud aru, kuidas neid täita ja miks seda vaja on.
Mida see mõjutab?
Ideaalis peaks ratas olema alati paigutatud teepinnaga risti ja sellised ratta joondusnurgad maksimeerivad stabiilsuse ja tagavad minimaalse vastupanu. Lisaks võimaldab selle reegli järgimine vähendada rehvide kulumist ja kütusekulu, mis avaldab äärmiselt positiivset mõju ka auto tööle. Kuid kahjuks pole sellist ideaali võimalik saavutada.
Ratta joondamise nurgad muutuvad pidevalt teeolud, koormaga või erinevatel pööretel, seetõttu panevad disainerid autosse mitukümmend erinevat parameetrit, mis määravad erinevatel tingimustel kõige optimaalseima positsiooni. Enamik neist parameetritest on seatud konstantseteks väärtusteks, samas kui muid ratta joondamise nurki saab reguleerida sõiduki töötamise ajal.
Kaasaegsetes välismaistes autodes on üldse võimalik reguleerida ainult sellist parameetrit nagu ratta joondamine, kuid sellel näiliselt positiivsel küljel on oma puudused. Näiteks kui füüsiliste kahjustuste tõttu on kere või veermiku geomeetria häiritud, saab ratta joondust reguleerida ja kui teostatakse ainult varba reguleerimine, on vaja läbi viia täielik asendamine kahjustatud osad, mis pole kaugeltki nii odavad.
Ratta nurk
Seda mõõdetakse vertikaalse ja joone vahel, mis läbib pöörlemiskeskme ja toe laagri pikiteljega paralleelses tasapinnas. See aitab stabiliseerida rooli, see tähendab, et see võimaldab autol sirgelt liikuda, kui juht ei hoia roolist kinni. Ratta visuaalseks mõistmiseks pidage meeles mootorratast või jalgratast, millel see on olnud roolisammas kaldub alati tahapoole, mistõttu püüavad nad liikumise käigus pidevalt sirgesse asendisse pöörduda, kui ratta joondust ei reguleerita.
See toimub ratta arvelt, kui juht ei hoia roolist kinni, sõidab auto otse ja pärast pööramist hakkab rattaid automaatselt tavapärasesse asendisse tagasi viima. Kui muudate esirataste nurki, siis on sel juhul autoga juhtimine keerulisem, kuna peate pidevalt juhtima ja see on üsna tüütu ülesanne mitte ainult juhile, vaid ka tema rehvidele, mis kuluvad piisavalt kiiresti. Kui suurendate ratast, siis hakkab auto mööda teid sõitma justkui radadel ja rooli keeramine nõuab ülimalt raskeid füüsilisi pingutusi. Muidugi kehtib kõik ülaltoodud pigem tagaveoliste autode puhul, mille puhul esirataste nurki reguleeritakse veidi erinevalt, sest esiveoliste autode korral tehakse kergelt positiivne ratta väärtus rataste stabiliseerimiseks nii liikumise ajal kui ka siis, kui ilmnevad äkilised külgkoormused või pidurdamine.
Kui juhtrataste joondenurki ei korrigeerita õigesti, hakkab auto sõidu ajal külili liikuma ja juht peab tegema suuri jõupingutusi, et oma sõiduk vasakule ja paremale küljele pöörata.
Camberi nurk

Seda mõõdetakse ratta vertikaalse ja pöörlemistasandi vahel. Teisisõnu, sõltumata sellest, kuidas tugid ja kangid liikumise ajal või koormuste muutumisel kallutatakse, peavad roolirattad tee suhtes jääma kindlaksmääratud piiridesse. Juhul kui ratta ülemine osa kaldub väljapoole, nimetatakse kumerust tavaliselt positiivseks ja kui see on sissepoole kallutatud, siis negatiivseks. Kui soovitatud rattajoondusandmetest on kõrvalekaldeid, hakkab auto järk-järgult küljele liikuma ja täheldatakse turvise ebaühtlast kulumist.
Lähenemine
See on sõiduki pikitelje ja ratta pöörlemistasandi vaheline nurk. Ratta joondusnurkade seadistamine võimaldab teil saavutada õige asend igal kiirusel ja sõltumata sõiduki roolimisnurkadest. Kui varvas on suurenenud, põhjustab see sae hammaste kulumist turvise välisküljel, samas kui negatiivne nurk mõjutab ka seestpoolt. Tuleb märkida, et selliste probleemide ilmnemisel võivad rehvid kurvides kriiskama hakata, auto juhitavus väheneb oluliselt ja kütusekulu suureneb samuti märkimisväärselt, kuna esirataste veeretakistus on suurenenud, mis mõjutab negatiivselt auto liikumist.
Lisaks näidatule on olemas ka nurgad, mille esinemine on ebasoovitav - need on liikumisnurgad, samuti nihked ühel või mitmel teljel. Kui autojuht selliste probleemidega kokku puutub, peate saatma auto autoteenindusse, kus spetsialistid kontrollivad rataste joondamise nurki. Nissani ja teiste kvaliteetsete välismaiste autode puhul on samuti sarnased probleemid ning nende olemasolul on enamasti vaja vedrustust parandada või auto kere taastada.
Millal ja miks korrigeerimine toimub?
Enamikus autodes nissani kaubamärgid, VAZ ja teised, mis ei ole varustatud McPhersoni vedrustusega, on esirataste kumerusel sageli väike positiivne väärtus (0–45 o), mille tõttu vähenevad juhitava ratta jõupingutused, samuti jõuülekanne roolimine igasugused jonnid. Kui sõiduk kasutab McPhersoni vedrustust, on ratastel negatiivne tõus või pole seda üldse.
Töö ajal mõjutavad erinevad vedrustuse osad loomulikku kulumist, mille tagajärjel rikutakse paigaldusnurki. Sellepärast peate aeg-ajalt (vastavalt juhistele) mõõtma paigaldusnurki tagumised rattad ja vajadusel neid reguleerida.
Kõige sagedamini nõuab kaasaegne "plaanivälist" kohandamist sõidukid pärast kõikvõimalike aukude või takistuste löömist, samuti pärast kehavigastusi põhjustanud õnnetuses osalemist. Kui märkate selliste juhtumite tõttu muutusi auto käitumises, peaksite selle viivitamatult teenindusjaama saatma.
Muuhulgas juhtub ka seda, et pärast rataste asendit mõjutavate vedrustuse ja rooliosade vahetamist peate minema "laiendajate" juurde.
Kui te pole ühtegi ülalnimetatud juhtumist kohanud, kuid arvate samal ajal, et olete rikkunud ratta joondusnurkade parameetreid, proovige analüüsida hetkeolukorda ja mõista, mis võis eelneda sõidu iseloomu muutumisele. Näiteks, kui teil olid varem teised rattad, siis kui need on tasakaalust väljas, võib ilmneda vibratsioon ja turvise ebaühtlane kulumine. Samuti väärib märkimist, et kui ratta poldid on ebapiisavalt pingutatud, võib auto perioodiliselt väriseda ning lisaks võivad defektide, erineva suuruse, mustriga ja isegi täispuhumisastmega rehvid põhjustada ka teie auto ebanormaalset käitumist maanteel.
Kui auto tõmmatakse külili, juhtub see sageli ratta pidurdamise, samuti talitlushäirete tõttu pidurimehhanism, samas kui purunenud amortisaatorid mõjutavad negatiivselt teie auto käitumist teel. Rooli tugev pöörlemine on tingitud roolivõimendi talitlushäiretest ja ratta laagrite põhjuseks on kleepumise vähenemine.
Seega ei tasu alati ratta joondusnurkade peal "patustada". VAZ ja teised koduautod eriti vastuvõtlikud sellistele talitlushäiretele, seega on kõige parem alustada nende kontrollimist.
Kus parandada?
Kõigepealt proovige leida tõeliselt professionaalne käsitööline ja ärge proovige otsida parima varustuse ja stendidega inimesi. Teenus tuleks valida vastavalt teie vajadustele, sest vastasel juhul maksate üle selle eest, mida te tegelikult ei vaja.
Näiteks kui auto on heas töökorras ja soovite lihtsalt varba sisselülitamist kontrollida ja reguleerida, pole selle jaoks üldse vaja 3D ratta joondustuge kasutada. Pädev tehnik saab selliste probleemidega üsna hästi hakkama, kasutades selleks mõõteriistu ja standardset tõstet, ning sama tulemusega pakutakse palju madalamat hinda. Kui soovite kogu geomeetriat kontrollida, vajate tõesti spetsiaalset varustust.
Millist varustust seal on?

Statiivid, kus kontrollitakse rataste joondamise nurki ja nende reguleerimine jaguneb kaheks põhitüübiks - arvuti ja optika. Igal variandil on oma omadused ja eelised.
Optiline
Need stendid on jagatud kahte kategooriasse - laser ja kiir. Viimases toimib hõõglamp valgusallikana. Ratastele on kinnitatud kaks allikat ning auto küljele ja ette on paigaldatud mõõtesõelad, millele projitseeritakse valgusvihk. Kui sõiduki ratta joondusnurgad on reguleeritud, suunatakse talad sõiduki ees olevale mõõtevardale. Laseriga on täpsem ja kaptenil on nendega mugavam töötada. Lifti või süvendi külgedele on paigaldatud mõõtesõelad, mille keskele tehakse augud, mille kaudu laserid üksteisele suunatud on. Ratastele on paigaldatud peeglid, mis peegeldavad ekraanidel olevaid kiiri.
Optiliste aluste eeliseks on nende lihtsus, samuti töökindlus ja suhteliselt madal hind, kuid neil on ka olulisi puudusi. Esiteks on need vähem täpsed kui arvutid, nad saavad töötada samaaegselt ainult konkreetse auto teljega ega näe ette võimalust kasutada spetsiaalset töötavate mudelite andmebaasi. Muu hulgas pole neil võimalust mõõta mõningaid parameetreid, mis iseloomustavad auto üldist "geomeetriat". Seega, kui auto kasutab ratastel joondusnurkade kontrollimist ja reguleerimist optilistel alustel, on see vastunäidustatud.
Arvuti

Seda tüüpi stendidel on ka kaks alamliiki - 3D ja CCD (sensor). Viimases on igale rattale kinnitatud mõõtepead, mille andmeid töötleb arvuti. Vastavalt kasutatud peade ühendamise meetodile võivad statiivid olla juhtmeta, samuti infrapuna-traadiga või traadita. Viimane tüüp on praegu kõige levinum, kuid valimisel tuleks arvestada ka tõsiasjaga, et ka tänapäeval kasutatakse mõnikord avatud vooluringiga arvutialuseid, mis oma funktsionaalsuse poolest on palju halvemad kui suletud ahelaga seadmed.
Arvutialuste eelised on ilmsed: multitegumtöötlus, ülitäpne täpsus, võimalus mõõta veel palju omadusi, samuti pidevalt uueneva andmebaasi kasutamine. Samuti väärib märkimist, et sellised seadmed kasutavad spetsiaalset programmi, mis ütleb mehaanikale toimingute jada. Kuid sellised alused pole ilma puudusteta - nendesse on paigaldatud üsna habras andurid ning need sõltuvad ka valgustus- ja temperatuuritingimustest.
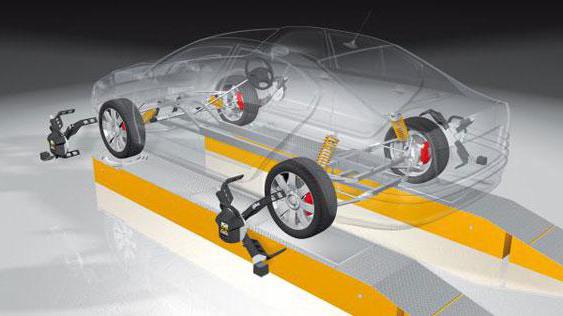
3D arvutialuste ilmumisega on sõna otseses mõttes toimunud revolutsioon rataste joondusnurkade kontrollimise ja reguleerimise valdkonnas. Auto ees olevale riiulile on kinnitatud spetsiaalne kaamera, mis võimaldab teil täiusliku täpsusega fikseerida plastikust peegeldavate sihtmärkide asukoha ratastel. Nurkade mõõtmiseks peate lihtsalt autot sõna otseses mõttes 20-30 sentimeetrit edasi-tagasi veeretama ja seejärel rooli eri suundades keerama. Pärast seda töötleb videokaameratelt saadud teavet hoolikalt arvuti, mis toodab reaalajas kõik vajalikud geomeetrilised parameetrid. Seda tehnoloogiat nimetatakse tänapäeval "masinnägemiseks".
Erilist tähelepanu tuleks pöörata asjaolule, et tänapäevased 3D-alused, erinevalt teistest, ei näe ette vajadust paigutada auto täiesti tasasele pinnale.
Töö peensused

Ratta joondamiseks võite minna ainult siis, kui teil on töökorras ja veermik ning enne reguleerimist peab kapten neid parameetreid kontrollima. Masin tõstetakse tõstukile ja seejärel kontrollib ja liigutab tehnik rattaid, kangi, vardasid, vedrusid ja paljusid muid vajalikke toiminguid.
Rehvirõhu mõõtmine ja vajadusel normaalseks muutmine on kohustuslik. Kui ilmneb liiga palju tagasilööki või osadele tekib füüsilisi kahjustusi, peab spetsialist protseduuri tingimata peatama ja keelduma kliendilt kohanemisest, kui probleemi pole võimalik kohapeal lahendada.
Kui sellele vaatamata kõrvalekaldeid ei leitud, paigaldatakse auto horisontaalsele platvormile, mille järel see laaditakse täielikult vastavalt tootja soovitustele. Teisisõnu, kui tehas määraks konkreetse koormuse nurkade väärtused, siis oleks otsene rikkumine proovida neid reguleerida täiesti tühjal masinal. Vedrustuse osade paigaldamiseks sisse tööasend esiteks pigistatakse seda vaevaga, surudes auto tagaosa ja esiosa alla. Tõsiste vigade vältimiseks mõõtmisprotsessis viiakse läbi ketta väljalaske esialgne kompenseerimine, olenemata sellest, millisel tugialusel reguleerimine toimub. Selle protseduuri läbiviimiseks riputab kapten telje, kinnitub ratastele mõõteriistadja siis nad kerivad. Kaasaegsetel 3D-alustel tehakse kompenseerimine ilma riputamata, veeretades autot 20-30 cm võrra eri suundades.
Kuidas reguleerimine toimub?

Kuna kõik paigaldusnurgad on omavahel ühendatud, püüavad spetsialistid nende reguleerimisel järgida äärmiselt selget järjestust. Esiteks reguleeritakse ratast ning seejärel vahetatakse kumerust ja varba. Valdavas enamuses tänapäevaseid välismaised autod määratakse ainult viimane parameeter.
Ratta reguleerimine hõlmab seibide arvu muutmist, samal ajal kui auto rattad töötades pidurdatakse pidurisüsteem (kuid mitte käsipidurit) - selleks kasutatakse töökodades spetsiaalset pedaalilukku. Põhimõtteliselt on ratta reguleerimise protseduur "razhalnikovi" jaoks kõige aeganõudvam, võtab palju aega ja seetõttu paljudele see ei meeldi. Mõned spetsialistid võivad seibid isegi peitliga lõigata, teised aga lihtsalt ei keskendu rattale ega püüa oma kliente veenda, et see nurk on korras, nii et peaksite alati valvel olema.
Camberi reguleerimine on sisse lülitatud kahekordsed õõtshoovad teostatakse samamoodi nagu ratta puhul. McPhersoni tüüpi vedrustuse puhul muudetakse kumerust enamasti spetsiaalse ekstsentrilise poldi pööramise teel, millega fikseeritakse tugi, kuid kasutada saab ka muid võimalusi. Näiteks on mõnel mudelil sellise poldi asemel paigaldatud spetsiaalne liugmehhanism või kangi põhjas võib olla reguleeriv element. On ka selliseid disainilahendusi, milles kõverust reguleeritakse kuulliigendi liigutamisega.
Enne varba sisselülitamist peab spetsialist selle esmalt keskmisesse asendisse seadma ning rool peab sirgelt seisma ja spetsiaalse lukuga kinnitama. Reguleerimine toimub pöörates otsa reguleerimishülsi mõlemal küljel (mitte kunagi ühel küljel). Üks õige toimimise tunnuseid on rooli sirgjooneline sirgjooneline liikumine ilma igasuguste moonutusteta. Vähemalt selle põhjal saate alati kindlaks teha, kui hästi reguleerimine toimus ja kas see tõesti aitas teil sõidu ajal probleemidega toime tulla.
Ratta õige joondamine on üks olulisemaid tegureid sõiduki normaalse juhitavuse, stabiilsuse ja stabiilsuse tagamisel sirgjoonel sõites ja kurvides. Iga mudeli optimaalsed vedrustuse geomeetrilised parameetrid on sätestatud projekteerimisetapis. Ratta joondusnurkade eelseadistatud väärtused võivad muutuda ja neid tuleb perioodiliselt reguleerida šassii osade ja elementide loomuliku kulumise tõttu või pärast vedrustuse remonti.
Õigesti häälestatud vedrustuse geomeetria võimaldab autol erinevate sõidurežiimide korral efektiivsemalt neelata jõu ja momente, mis tekivad ratta kokkupuutel teekattega. See tagab auto prognoositava käitumise, nimelt: liikumise stabiilsus sirgjooneliselt, stabiilsus kurvides, stabiliseerumine kiirendamisel ja pidurdamisel. Samuti tekib rataste liigse veeretakistuse puudumise tõttu ühtlasem rehvide kulumine, mis võimaldab pikendada nende tööiga.
Tootja poolt määratud rataste joondamise väärtused on konkreetse sõiduki jaoks optimaalsed ning vastavad selle otstarbele ja vedrustuse seadistustele. Kuid vajaduse korral on struktuuriliselt ette nähtud võimalus neid muuta või kohandada. Parameetrite arv, mida saab reguleerida iga sõiduki jaoks, on individuaalne.
Autode rataste põhiliste nurkade tüübid
| Parameeter | Auto telg | Reguleeritav parameeter | Mis mõjutab |
|---|---|---|---|
| Camberi nurk (Camber) | Esiosa tagasi | Jah (sõltub autost) | Stabiilsus kurvis Enneaegne rehvide kulumine |
| Varba nurk | Esiosa tagasi | Jah | Püsivus sirgjooneliselt Enneaegne rehvide kulumine |
| Külgmine pöördnurk (KPI) | Esiosa | Ei | |
| Pikisuunaline nurk kallutatav pöörlemistelg (ratas) | Esiosa | Jah (sõltub autost) | Sõiduki stabiliseerumine sõidu ajal |
| Murdmine õlale | Esiosa | Ei | Sõiduki stabiilsus pidurdamisel Sõiduki stabiliseerumine sõidu ajal |
Camber
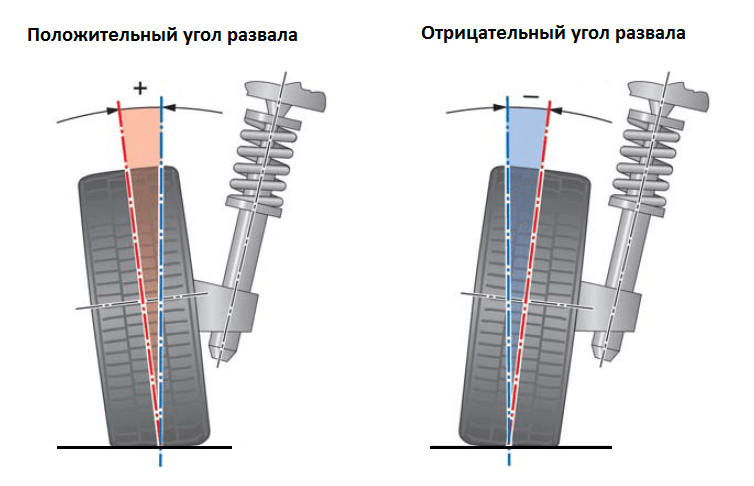 Positiivne ja negatiivne kaar
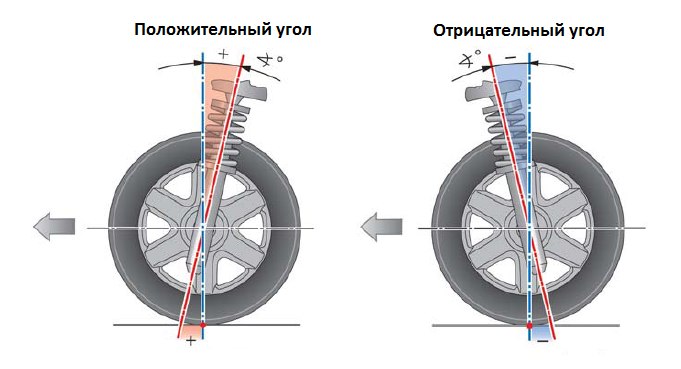
Positiivne ja negatiivne kaar Camber (eng. kammima) Kas nurk, mille moodustab ratta kesktasand ning ratta kesktasandi ja kandepinna ristumiskohta läbiv vertikaal? Tehke vahet positiivsel ja negatiivsel tõusul:
- positiivne (+) - kui ratta tipp on kallutatud väljapoole (autokerest eemale)
- negatiivne (-) - kui ratta tipp on kallutatud sissepoole (auto kere suunas)
Camber on struktuurselt moodustatud rummusõlme asendist ja tagab maksimaalne pindala rehvi kokkupuutepunktid teega. Kahekordse õõtshoovast sõltumatu vedrustuse korral määratakse rummu asend ülemise ja alumise järgi õõtshoovad... MacPhersoni tugipunktis mõjutab kumerust õlavars ja tugipost.
Kummardusnurga väärtuste kõrvalekalle normist mõjutab autot järgmiselt.
- auto hea stabiilsus pööretel
- sirgjoonel sõites halveneb rataste haarduvus
- suurenenud kulumine sees rehvid
- hea haarduvus
- halvendab kurvides püsivust
- suurenenud rehvi väliskülje kulumine
Ratta joondamine
 Auto rataste joondamine
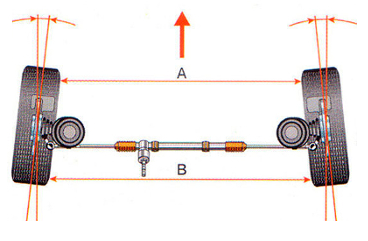
Auto rataste joondamine Ratta joondamine (eng. varvas) Kas sõiduki pikitelje ja ratta pöörlemistasandi vaheline nurk. Seda saab defineerida ka kui rataste velgede esi- ja tagaseinte vaheliste kauguste erinevust (joonisel on see väärtus A miinus B). Seega saab lähenemist mõõta kraadides või millimeetrites.
Tehke vahet totaalse ja individuaalse lähenemise vahel. Iga ratta jaoks arvutatakse eraldi varvas. See on selle pöörlemistasandi hälve sõiduki pikisümmeetriateljest. Sisenemine arvutatakse ühe telje vasaku ja parema ratta individuaalsete varbanurkade summana. Kogu lähenemine millimeetrites määratakse sarnaselt. Positiivse lähenemisega (eng. varba sisse) rattad on vastassuunas pööratud sõidusuunas negatiivse väärtusega (eng. varba välja) - väljapoole. 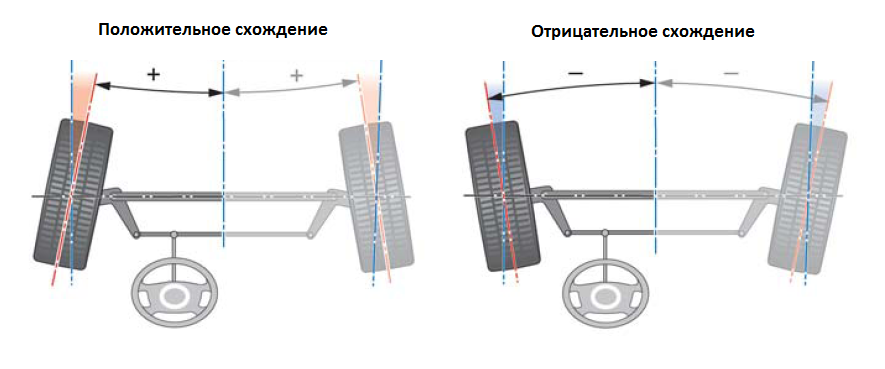 Rataste positiivne ja negatiivne joondamine
Rataste positiivne ja negatiivne joondamine
Varba nurga väärtuste kõrvalekalle normist mõjutab autot järgmiselt.
Liiga suur negatiivne nurk:
- seestpoolt suurenenud rehvide kulumine
- auto äge reaktsioon roolile
Positiivne nurk on liiga suur:
- liikumistrajektoori halvenemine
- suurenenud rehvide kulumine väljastpoolt
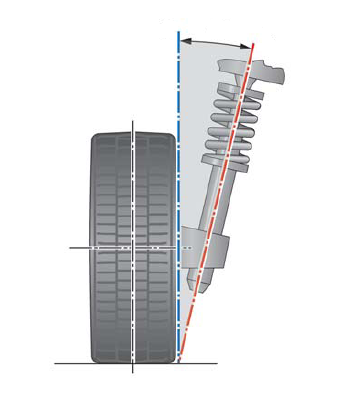 Ratta telje kaldenurk põiki
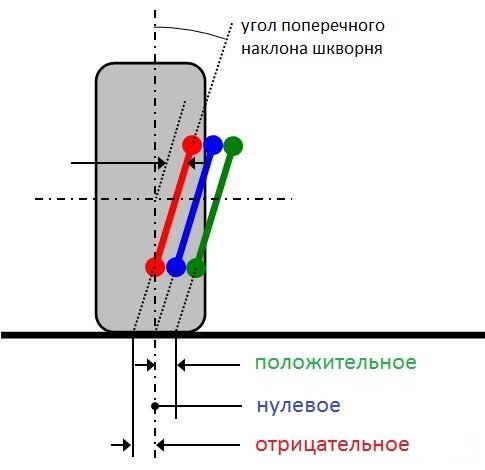
Ratta telje kaldenurk põiki Pöörlemistelje kaldenurk põiki (eng. KPI) Kas nurk ratta pöörlemistelje ja risti tugipinnaga on. Tänu see parameeter juhtrataste pööramisel tõuseb auto kere, mille tagajärjel tekivad jõud,
rattaga sirgjoonelisse asendisse pöördumine. Seega on KPI-l märkimisväärne mõju sõiduki stabiilsusele ja stabiilsusele sirgjoonel sõites. Parema ja vasaku silla külgmiste kaldenurkade väärtuste erinevus võib viia sõiduki külgsuunalise kallutamiseni. See efekt võib ilmneda ka siis, kui teiste ratta joondusnurkade normväärtused on järjepidevad.
Ratta telje kaldenurk
 Pöörlemistelje pikisuunaline kaldenurk
Pöörlemistelje pikisuunaline kaldenurk Pöörlemistelje pikisuunaline kaldenurk (eng. ratas) -nurk ratta pöörlemistelje ja sõiduki pikitasapinnal risti kandepinnaga. Tehke vahet ratta pöörlemistelje positiivse ja negatiivse kaldenurga vahel.
Positiivne ratas edendab täiendavat dünaamiline stabiliseerimine keskmiselt sõites ja suur kiirus... See halvendab alajuhitavust madalal kiirusel.
Murdmine õlale
 Sissemurdmise õlgade väärtus
Sissemurdmise õlgade väärtus Lisaks ülaltoodud parameetritele on esisilla jaoks suur tähtsus veel ühel omadusel - sissetungitud õlg. See on ratta sümmeetriatelje ja tugipinna lõikepunktist moodustunud punkti ning pöörlemistelje põikkalde joone ja tugipinna lõikepunkti vaheline kaugus. Keeratav õla on positiivne, kui pinna ja ratta pöörlemistelje lõikepunkt asub ratta sümmeetriateljest paremal (nullõlg), ja negatiivne, kui see asub sellest vasakul. Kui need punktid langevad kokku, on sissesõidetud õlg null.
See parameeter mõjutab ratta stabiilsust ja juhtimist. Kaasaegsete autode optimaalne väärtus on null või positiivne õlg sisse jooksmas. Sissekäigu õla märk määratakse kindlaks ronimise telje kaldenurga, külgsuunalise kalde ja ratta nihke järgi.
Autotootjad ei soovita installimist rataste kettad mittestandardse lahkumisega, sest see võib viia seatud sissejooksmisõla muutumiseni negatiivseks väärtuseks. See võib tõsiselt mõjutada sõiduki stabiilsust ja juhitavust.
Ratta joondamise väärtuste muutmine ja nende reguleerimine
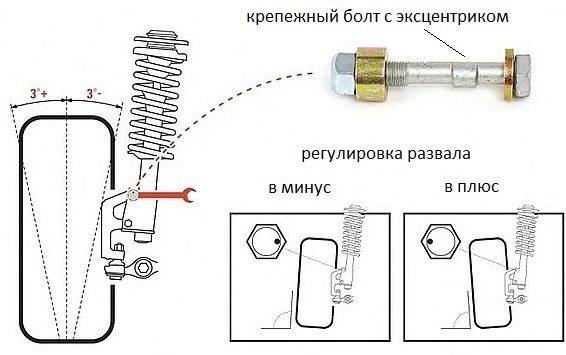 Camberi reguleerimine MacPhersoni tugil
Camberi reguleerimine MacPhersoni tugil Ratta joondusnurgad võivad muutuda osade loomuliku kulumise tõttu, samuti pärast nende asendamist uutega. Eranditult on kõigil vardadel ja otsadel keermestatud ühendus, mis võimaldab teil varba nurkade väärtuste kohandamiseks nende pikkust suurendada või vähendada Tagarataste ja ka esimeste ratta sisselülitamist saab reguleerida igat tüüpi vedrustuse korral, välja arvatud tagumine sõltuv tala või telg.
Kõigil autodel ei ole tagumise ja esisilla teljevahe väärtuste reguleerimine ette nähtud: see puudub sõltuval vedrustusel, MacPhersoni vedrustusel (välja arvatud väike arv automudeleid, mille ülemine hammaskinnitus on ekstsentrikuga polt). Seal on kaarekujuline seade, tavaliselt mõlemal teljel ülemise ja alumise õõtshoovaga.
Esiveolise sõiduki vale kõverdamine mõjutab vähem juhitavust ja ebaühtlast rehvide kulumist, kuna tagaosa on vähem koormatud. Parameetrid ratas ja KPI, mille reguleerimine auto vedrustuse konstruktsioonis tavaliselt puudub, peavad alati vastama lubatud väärtustele.
Sõitmise nautimiseks peab auto olema mitte ainult hõlpsasti juhitav, vaid ka maanteel ohutu.
Olulist rolli sõidu lihtsuses mängib õige laskumine - ratta kõverus.
Proovime kõigepealt mõista mõlke ja varba mõtet.
Ahenda
Mis täpselt on ratta kõverdumine? See on sõiduki rataste kaldenurk tee suhtes. Reeglina mõistetakse kõverdumist kui veorataste staatilist tõusu. Kuid mõnes autos reguleeritakse kumeruse lähenemist ja "passiivseid" rattaid. Kui rehvi ülemine serv kaldub rohkem masina poole, on kumerus negatiivne või negatiivne. Kui rehvi ülemine serv on sõiduki keskosast kaugemal, on tõusmine positiivne või positiivne.
Negatiivne kõveruse väärtus mõjutab negatiivselt sõiduki stabiilsust. Suur tähtsus negatiivne kaar näitab, et vedrustus on kas kulunud või valesti reguleeritud. Selle tagajärjel kulub kumm kiiresti, haarduvus halveneb ja sõiduki suunastabiilsus teel väheneb.

Ideaalne kõverus on siis, kui kõveruse väärtus on , nii et rehvid kuluvad vähem.
Kui peate veojõudu suurendama, peate esiratastele panema 2 või 1,5 kraadi ja tagaosa 1,5 kraadi, muidugi kummi kahjuks.
Vedavate rataste kumeruse peamine eesmärk on vähendada tee ebatasasuste ülekandumist roolile, mis kustuvad kummi elastsuse tõttu. Camber suurendab ka rattakaitsmete haardumist teega, muudab auto kurvides stabiilsemaks, mis mõjutab auto stabiilsust ja "kuulekust" juhtimisel.
Mis puutub vedrustuse kinemaatikasse, siis kumerus ja ka kaldenurk üle joone, mida mööda veorattad pöörlevad, mõjutavad mahasurumisraadiust, kuid see mõju on palju väiksem kui teine \u200b\u200bantud tegur. Tegelikult on auto liikumisnurk ilma liikumiseta seatud üsna ligikaudselt (paigaldamisel tekkivat viga saab võrrelda selle väärtusega), millele lisandub ka kaldenurga väärtus, kui vedrustus töötab.
Ratas
Ratas on teisisõnu nurk, mis saadakse tavapäraselt joonistatud vertikaalse joone ja telje vahel, mida kasutatakse ratta pööramiseks mööda autot mööda kulgevas tasapinnas. Ratta funktsioon on rattad "automaatselt" joondada sõiduki kiirusega.
See tähendab, et pärast pööramist jätab auto selle ise, nimelt: rool Sellel on vabajooks, tänu millele suudab ta ise sirgjoonelise liikumise juurde naasta (eeldusel muidugi, et kogu mehaanika on õigesti reguleeritud). Mis on positiivse ratta tulemus. Mõnel juhul muudab tehase rattaväärtuse muutmine sirgjoonelise liikumise stabiilsemaks.
Liigne ratasväärtus annab roolile nn "raskuse". Katsefännide jaoks võib tunduda huvitav seadistada ratas "tehaseseadete" suhtes +1 või +2 kraadi juurde. Sellised muudatused muudavad auto kurssi stabiilsemaks, see kipub veelgi sirgemini edasi liikuma.
Lähenemine
Toe-ini võib määratleda kui erinevust rataste eest ja taga.

Mõnes autos on võimalik reguleerida kõigi nelja ratta varbaosa.
Sisselaskmise eesmärk on kompenseerida sõiduki külgsuunalist liikumist positiivse kõveruse tõttu, vältides seega märkimisväärset kummi kulumist. Varba ja kumerust kontrollitakse alati korraga.
Positiivse lähenemise eeliseks on stabiilsus suur kiirus liikumine, puudus - auto muutub mõnevõrra "kohmakaks".
Väärikus negatiivne lähenemine on rataste suurenenud tundlikkus rooli "käskude" ja miinuste suhtes - kumm "sööb kiiresti" ära, tunneme rooli kaudu kõiki muhke või lihtsalt "lööme".
Vale joontega varba peetakse üheks kiireks kulumise peamiseks põhjuseks. Tavaliselt on esimene märk sellest, et varvaväärtus on seatud, madalal kiirusel kurvides nurisemine. Kui varba väärtus on 5 mm või rohkem, kulub rehv täielikult alla 1000 km. On soovitav, et lähenemine oleks null.
Millal on vaja ratta joondust reguleerida.
Vajalik on reguleerida VAZ-i või mõne muu auto kaarekumerust, kui:
- Olete vahetanud rehve;
- "Hobune" on läbinud juba tubli 10–11 tuhat km;
- Veermik parandati;
- Millal kiiresti sõitmas on kuulda suurenenud rehvimüra;
- Auto sõidab tasasel ja sirgel teel ning teda juhitakse minema;
- Autoga on sõitmine järjest hullem.
Kui suur on autode kallutamise hinnanguline maksumus? Sõiduautode puhul on see umbes 1600 rubla. Ja pealegi reguleeritakse kolmnurkse hoova paigaldamisel ratta nurka palju lihtsamalt ja suurema väärtusega.



