Täisteksti otsing:
Avaleht\u003e Kursustööd\u003e Transport
Sissejuhatus 3
Looper 100, kuna see on fikseeritult looperi võlli 53 külge, järgib nii edasi-tagasi kui ka pöörlevat liikumist. See elliptiline kõver tähistab vajalikku rada, mida looperi ots 118 peab liikuma koos nõelaga 101, moodustades soovitud silmuse 401. See tähendab, et keskpunkt 147 on väljaspool rõngakäigu sammu läbimõõtu.
Kasutada võib mis tahes arvu reguleeritavaid kinnitusvahendeid, näiteks lukukruvi, klambrit jne. Sama võib öelda kõigi elliptiliste kõverate kohta, mis on välja toodud kuulivahendi väljumise keskpunkti 147 abil. Modulaarse kardaani vahendite tasakaalustamine viidi läbi eesmärgiga kas vähendada või vähendada parimal juhul kõrvaldada inertsjõudude mõju süsteemi kvaliteedile. On leitud, et see, kuivõrd lahendamata inertsjõude saab minimeerida või kõrvaldada, sõltub töö konkreetsest teest.
1. Disaini ülevaade 5
1.1. Kardaani ülekannete põhinõuded ja nende klassifitseerimine. viis
1.2. Kardaani ülekanne ebavõrdsete hingedega nurkkiirused 8
1.3. Kardaanmootorid liiguvad püsikiirusega. viisteist
1.4. Jõuülekande põhiosade materjalid 26
1.5. Prototüübi valik 26
Kui inertsjõude süsteemis pole lubatud, võib nende olemasolu põhjustada võnkeid ja koormuste ümberpööramist, mis omakorda võib põhjustada elementides suurenenud pinget ja vabalt paigaldatud elementide kokkupõrkeid. Selle tulemuseks on suurem müra ja kulumine ning koormatud elementide väsimuse vähenemine.
Süsteemi saab tasakaalustada kahest erinevast suunast. Esimene lähenemine on teoreetilisel tasandil, mis püüab ennustada lahendamata inertsjõudude seisundit ja töötada välja nende lahendused enne komponentide tegelikku valmistamist. Teises meetodis kasutatakse tegelikke osi ja analüüsitakse nende lahendamata inertsjõude, mis on tingitud tootmistolerantsidest, näiteks tasakaalustusmasinaga. See teine \u200b\u200bmeetod on ilmselgelt tehnika tasemes hästi teada ja seetõttu ei arutata enam.
2. Auto GAZ-2410 kardaani ülekande arvutamise kontrollimine 28
2.1. Koormusrežiimid 28
2.2. Väändepinge ja väändenurga määramine kardaan 29
2.3. Toimiva telje jõu määramine kardaan 30
2.4. Pöörlemise ja inertsimomendi ebaühtluse hindamine 31
2.5. Kardaaniristi arvutamine 35
Teoreetilise lähenemise abil saab välja töötada Cardani ülekandeseadme teoreetilise mudeli. Selles konkreetses mudelis saab lahendamata inertsjõudude mõistmisega teha tark valik laagrid ning materjalide valik ja jaotamine mõistliku pingetaseme saamiseks. Lisaks saab inertsjõudude lahendamiseks lahendada hulga erinevaid elemente. Teoreetilise mudeli väljatöötamise esimene samm on luua kardaanülekandesüsteemi töörežiim ja funktsioon.
Näiteks on erinevad rajad sirged, spiraalsed, elliptilised või spiraalse ja elliptilise kombinatsiooniga. Seega jäädvustatakse või määratakse enne tegelikku kavandamist töövahendite liikumine. Seega määratakse kardaani hammasrataste elementide geomeetriline suhe. Matemaatilise mudeli väljatöötamise hõlbustamiseks tehti mitu eeldust vaadeldava süsteemi füüsikaliste omaduste kohta. Esiteks peetakse mehhanismi kõiki elemente jäigaks. Paindefekte peetakse ebaoluliseks nende mõju poolest inertsi tasakaalustamisele.
2.6. Kardaaniharkide arvutamine 37
2.7. Nõelalaagrile mõjuva lubatud jõu määramine 39
2.8. Propelleri võlli pöörete kriitilise arvu arvutamine 40
2.9. Kardaani termiline arvutus 41
Järeldus 47
Kirjandus 49
Tehke GAZ-2410 "Volga" auto kardaani ajami kontrollarvutus ülekantava pöördemomendi suurenemisega 1,5 korda.
Teiseks peetakse kõigi elementide loomulikku sagedust kõrgemaks kui kardaanide tavaline töösagedus. Kolmandaks on erinevate mehaaniliste komponentide mass kontsentreeritud. Seega tuleb dünaamiliselt analüüsida vaid mõnda diskreetset punkti. Muidugi koosneb tromb kõigi elementide kontsentratsioonist, masseerituna selle raskuskeskmes. Lõpuks peamine nurkkiirus sisendvõll veovõlli hoitakse konstantsena.
Seejärel analüüsitakse põhigrupi enda dünaamilisi inertsjõude. Need jõud rakendatakse seejärel teisele baasgrupile ja see rühm on tasakaalus. Saadud jõud asetatakse seejärel kolmanda baasgrupi peale, mis on lõpuks tasakaalus. Teine põhirühm sisaldab väikest vända või hammasratta 506 ja kõike, mis juhtub. Kolmas põhirühm sisaldab peamist vända või peavõlli 508 ja kõiki sel viisil valmistatud komponente. Igas neist põhirühmadest on massid kontsentreeritud nii, et säiliksid samad inertsiaalsed omadused kui tegelikul rühmal.
Sissejuhatus
Autol on inimese elus oluline roll. Peaaegu selle leiutamise hetkest alates võttis see kohe ühe juhtiva koha rahvamajanduses. Autotööstus areneb väga kiiresti. Autode tootmisel kasutatakse kõige arenenumaid tehnoloogiaid.
Tuleb märkida, et autotootmise iseloomulik tunnus, eriti viimastel aastatel, on selle orientatsioon konkreetsele tarbijale. Seetõttu ilmub sama põhimudeli suur hulk modifikatsioone, mis erinevad vähese arvu parameetrite poolest. See tendents ilmneb eriti välismaiste ettevõtete seas, kus ostja saab määrata auto täieliku komplekti. See pole tüüpiline kodumaisele autotööstusele ja eriti sõiduautode tootmisele. Ehkki viimasel ajal on ilmunud palju autode "perekondi" (nagu näiteks Volzhsky autotehases), on alles jäänud märkimisväärne arv vanu mudeleid. Nendes tingimustes muutub masinate "muutmine" kiireloomuliseks. Omanik teeb iseseisvalt muudatusi auto kujunduses, püüdes seda võimalikult palju töötingimustega kohandada. See võib olla kere tüübi muutus, uue üksuse paigaldamine vana ressursi asendamiseks, mis on oma ressursi ammendanud ja erineb viimasest paljude näitajate jms poolest. Auto esialgse disaini muudatused toovad kaasa töörežiimide ja selle osade koormuse muutmise. Uued töötingimused erinevad nendest, mis määrati kindlaks sõiduki projekteerimisel. Seetõttu on vaja kontrollida sõidukiüksuste tööd nendes uutes režiimides.
Kõik see toob kaasa kardaani lihtsustatud teoreetilise mudeli, milles mitmed kontsentreeritud massid, millel on teatud positsiooniline suhe üksteisega, esindavad tõelist mehhanismi. Kuid peaveovõll 508 ja käiguvõll 506 on orienteeritud kohaliku koordinaatsüsteemi suhtes. Nurk 510 tähistab viltu. See hõlmab koordinaatide teisendamise kasutamist ühest süsteemist teise liikumiseks.
Mõlemad koordinaatsüsteemid on fikseeritud ja ei liigu ühelgi Cardani käiguelemendil töötsükli jooksul. Nii globaalsed kui ka kohalikud koordinaatsüsteemid on pärit peamiste kandevahendite keskpunktist 512. Kavandatud lennukid, milles erinevad põhikomponendid töötavad, määratakse antud koordinaatsüsteemi kahe telje abil. Aktsepteeritud teoreetilise mudeli abil saab välja töötada matemaatilised võrrandid, mis määravad selle kinemaatilised omadused.
Selle töö eesmärk on kontrollida GAZ-2410 kardaanülekande kontrollarvutust ülekantava pöördemomendi suurenemisega. Edastatud pöördemomendi suurenemist saab seletada suurema käigukastiga teise käigukasti paigaldamise või uue mootori paigaldamisega. Viimast kohtab praktikas sageli. Vana mootor võib oma ressursi täielikult ammendada ja selle asemele saaks paigaldada uue suurema jõudlusega mootori. Vajadus mootori suurema pöördemomendi väljatöötamise järele võib olla tingitud vajadusest ületada suurem vastupanu sõidu ajal (kere ümbervarustuse tõttu suurenenud koormusega auto käitamine, mittestandardse haagise kasutamine jne), soov kiirenduse omadusi parandada. Mootori omaduste oluliste muutuste korral on vaja kontrollida kardaani käitusvõimet uutes töötingimustes, kuna selle parameetrite järgi ei pruugi see olla võimeline edastama suurenenud pöördemomenti. Sellisel juhul on vaja selle disaini muuta.
Kuna looperi inertsiaalsed jõud tähendavad 500 ja teisi esimese põhirühma komponente ei saa seestpoolt hõlpsasti tasakaalustada, kantakse raskus hammasratta võllile. Selle kontsentreeritud massi punkt on esindatud nendes jõudude vastastikmõjudes, mis vastavad kahele pöörlemiskiirusega kahele vahendile 536 ja 538 ning jõu ülekandevahendile. Looperi inertsiaalne koormuselement 500 edastatakse läbi ühe jõupunkti, st jõuülekande vahendid 504 ja kaks topeltkiirusega vahendit, mis simuleerivad hammasratta võlli tuge või väikest vända.
Töö eesmärk ei ole mitte ainult kardaani ülekande efektiivsuse kontrollimine ülekantava pöördemomendi suurenemisega ja ebarahuldavate tulemuste korral teha ettepanekuid selle konstruktsiooni muutmiseks. Samuti viiakse läbi olemasolevate struktuuride analüüs, mis eeldab üksikasjalikku ja põhjalikku tutvumist üksustega, üksustega, mis on disainilahendusega sarnased disainiobjektiga, koos selle valdkonna viimaste saavutustega, kaaludes konstruktsioonide väljavaateid. Samuti on töötingimuste muutumisel oluline omandada ja harjutada veeremiüksuste, autosüsteemide kontrollarvutuste meetodeid, mida saab kasutada edasistes tegevustes.
Rõngasratast 524 ei peeta vastastikuse mõju jõuks kinemaatiline analüüs ja toimib ainult hammasratta aju piirajana. Kuna käiku 506 hoitakse konsooliasendis ja ka ruumipiirangute tõttu, pole lahendamata inertsjõudude tasakaalustamine kahes tasapinnas lihtne. Seetõttu viiakse väikeste väntade matemaatiline analüüs läbi ühes tasapinnas. Võlli kokkuvolditud mass, mille võlli pöörlemiskiirus on kaks korda suurem, ja veovõll ise jäetakse praegu tähelepanuta, kuna need asuvad pöörlemisjoonel.
1. Kujunduste ülevaade
Kardaanmootoreid kasutatakse autode ülekannetes mehhanismide jõuülekandeks, mille võllid pole koaksiaalsed või asuvad nurga all ning nende suhteline asend võib liikumise ajal muutuda. Kardaanmootoreid kasutatakse ka abimehhanismide, näiteks vintsi käitamiseks. Mõnikord on rool kardaanülekande abil ühendatud roolimehhanismiga. Kardaanülekanne koosneb kolmest põhielemendist: kardaani liigendid, härjad ja nende tuged.
Kolm kinemaatilist asendisuhet saab kavandada tugivõllid 506, vastukaal ja 518 punkti ning 520 ühepunkti ja koostoime mõttes tööjõud... Need kolm seost määravad ühemõtteliselt sõltumatute muutujate seose sõltuvate muutujatega. Teine kinemaatiline on see, et looper tähendab pöörlemissuhet sõltumatu muutuja suhtes selle alamsüsteemi täielikuks määratlemiseks. Nurk 528 määrab selle pöörde suuruse.
Nurk 544 määratleb hammasratta 506 ja kohaliku koordinaadi nurga suhte. Selle seose fikseerivad hammasratta 546 piirang ja haardumine hammasrattaga 524. Nende nelja suhte esimene tuletis annab häirimise kiiruse. Teine tuletis kiirendab neid punkte. On selge, et kõik väljatöötatud massid ja geomeetrilised seosed on kehtestatud üldises vormis, mis võimaldab teil süsteemi optimeerimiseks muuta mis tahes muutujat.
1.1. Kardaani ülekannete põhinõuded ja nende klassifitseerimine.
Kardaanmehhanismidele (KP) esitatakse järgmised põhinõuded:
pöördemomendi ülekandmine genereerimata lisakoormused ülekandes (painutamine, keerdumine, vibreerimine, aksiaalne);
võime pöördemomenti edastada, tagades samal ajal veo- ja veovõlli nurkkiiruste võrdsuse, olenemata ühendatud võllide vahelisest nurgast;
See tähendab, et hammasratta võlli 506 peetakse põhitelje suhtes tasakaalustatuks. et kui käiguvõlli 506 ümber olev hetk on , siis konstantne saadud vektorjõud pöörleb peavõlli nurkkiirusel radiaalselt ümber peavõlli. Peavõlli 508 inertsjõu analüüs viiakse läbi kahes tasapinnas. Peamise võlli inertsjõudude lahendamise esimene samm on kõigi saadud käiguvõlli 506 jõudude ülekandmine kahekordse liikumisjõuga punktidesse 536 ja need jõud mõjuvad peavõllile 508 võrdsetes kogustes, kuid vastassuunas, kui kõik jõud ja pealaagri 514 keskosas 512 kahes tasapinnas mõjuvad momendid, mis mõjuvad peavõllile 508, on , peavõlli võib pidada tasakaalustatuks nii staatiliselt kui ka dünaamiliselt.
kõrge efektiivsusega;
müra;
üldised nõuded komponendid ülekanded - usaldusväärne pöördemomendi ülekanne, minimaalne inertsimoment, hea soojuse hajumine hõõrdepindadelt.
Nende nõuete täitmiseks erinevate sõidukite erinevates töötingimustes on kardaanmootorite skeemid erinevad.
Kuna peavõllile 508 mõjuvad ülekantavad ja inertsjõud jäävad kogu töötsükli jooksul konstantseks, tuleb peavõlli tasakaalustada ainult ühes asendis. Peavõlli vastukaalu massi 530 saab kahes tasakaalustustasandis iseseisvalt reguleerida. Tuleb märkida, et punkt 542 ulatub lehe tasapinnale. Sellest analüüsist selgus mitu olulist aspekti. Esiteks tuleb märkida, et vastukaalu, näiteks 520, massi saab vähendada ja paigutada pöörlemisteljest kaugemale ning see hoiab endiselt inertsiaalset tasakaalu.
Suletud kardaanülekanded. Sõidukite puhul, kus tagatelje reaktsioonimoment võtab toru, asetatakse kardaan toru sisse. Mõnikord on see toru ka tõukejõudude edastamiseks. Kuna propelleri võlli pikkus selles konstruktsioonis ei muutu kere ja tagatelje suhteliste liikumiste korral, puudub seda tüüpi propellerivõllil kompenseeriv (teleskoop) ühendus ja kasutatakse ainult ühte propelleri liigendit. Sellisel juhul kompenseerib propelleri võlli ebaühtlast pöörlemist mingil määral selle elastsus. Sellise ülekande skeem on näidatud joonisel 1, a. On kujundusi sõiduautod, milles käigukasti ja peaülekande ühendamine toimub torsioonvõlli abil ja kardaanühendused puuduvad. See on võimalik autodel, mille põhikäik on paigaldatud tagaküljele (Volvo-600). Kuid ülalkirjeldatud kardaanmootorite kujundused pole levinud.
Seda asjaolu saab kasutada hammasratta võllil 506 pidevate inertsjõudude vähendamiseks madalamale väärtusele, minimeerides seeläbi topeltkiirusega laagrite pinget. Selle tulemuseks on rohkem pikaajaline laagriteenus ja palju muud madal tase vastavate osade pinged. Teiseks on selle analüüsi põhjal selge, et hammasratta pole vaja kahes tasapinnas tasakaalustada, selle asemel on vaja ainult staatilist tasakaalustamist. Saadud tasakaalu olek peavõllil 508 on sama, olenemata sellest, kas hammasratta võll 506 on dünaamiline tasakaal või mitte.
Avatud kardaanid. (Joonis 1, b) Autode puhul, mille reaktiivmomenti tajuvad vedrud või reaktiivvardad, peab kardaanülekandel olema vähemalt kaks hinge ja kompenseeriv ühendus, kuna hingede vaheline kaugus liikumise ajal muutub. Kasutatakse kahe-, kolme- ja mitme hingega hammasrattaid (viimaseid esineb suhteliselt harva). Pika teljevahega sõidukitel, mille ühikute vaheline kaugus on suur, kasutatakse kardaanmootoreid, mis koosnevad kahest võllist - vahe- ja peavõllist. See on vajalik tänu sellele, et ühe pika võlli kasutamine võib põhjustada ohtlikke külgvibratsioone, mis tulenevad selle kriitilise nurkkiiruse kokkulangemisest operatiivsega. Tankvõllil on suurem kriitiline kiirus. Vahevõlli paigaldatud vahetoele, millel peab olema teatud elastsus. See on vajalik põhjusel, et elastsetele padjadele paigaldatud auto jõuüksusel (mootor, sidur, käigukast) on teatud vabadus nii vertikaalses kui ka horisontaalses tasapinnas. Mõnel autol kasutatakse vahepealseid tugesid, mille korpusesse on jäigalt paigaldatud laagrid, kuid korpus ise võib sellisel juhul kiikuda raamidel, mis on ühendatud raami ristmiku külge kinnitatud kronsteiniga.
Ülaltoodud analüüsi saab rakendada vähemalt neljale erinevale töö tegemise viisile ja neile vastavale väljumisteele. Kõik need erinevad teed või liikumised kujutavad endast oma konkreetseid hoiakuid ja väljakutseid. Näiteks selleks otsene liikumine või töövahendite väljund, on tasakaalustav analüüs lihtne. Kuid võttes arvesse tootmistolerantse jne. Tuleb mõista, et teoreetilisi saavutusi ei saa kunagi absoluutselt saavutada, vaid nad saavad neile ainult lähedale jõuda.
Kuid nagu eelnevalt selgitatud, tuleb mitte ainult teostada töövahendeid looperi varda 500 põhiteljel, vaid neid tuleb ka oma kohale pöörata. Selle tulemuseks on inertsiaalne pöördemoment, mis toimib looperi vahendite põhiteljel. Tavalisel viisil tasakaalustamine ei lahenda seda punkti.

Kinemaatika osas eristatakse ebavõrdse (asünkroonse) ja võrdse nurkkiirusega (SHRUS) kardaanühendusi. Ebavõrdseid nurkkiirusega liigendeid kasutatakse hammasratastes, kui veovõlli kallutatakse mitte rohkem kui 20 of nurga all. Vahepealse ristiga asünkroonseid universaalühendusi kasutatakse laialdaselt. Samuti on universaalseid asünkroonseid universaalühendusi, mis erinevad lihtsatest selle poolest, et aksiaalne kompenseerimine toimub neis liigendmehhanismis endas, mitte spline-ühenduses. Auto vedavate ja samaaegselt juhitavate rataste ajamises kasutatakse võrdse nurkkiirusega kardaani liigendeid, veetava võlli kaldenurk võib sõltuvalt hinge konstruktsioonist ulatuda 45-ni. Mõned CV-liigendid on samuti universaalsed, mehhanismi sees on kompenseeriv seade.
Koos kardaanliigenditega kasutatakse ka poolkardaanühendusi. Elastsed poolkardaanühendused paigaldatakse peamiselt sõiduautode kardaanmootoritesse ning sõltuvalt konstruktsioonist võib võlli kalle kaldenurk olla 8 kuni 10. Jäigasid poolkardaanseid hingesid kasutatakse ebatäpsuste kompenseerimiseks ühendatud mehhanismide paigaldamisel juhtudel, kui viimased on paigaldatud ebapiisavalt jäigale alusele. Nemad on käigukangid... Võlli kaldenurk mitte üle 2 не.
Kardaanühenduste üldine klassifikatsiooniskeem on toodud joonisel 2.
1.2. Kardaani ülekanne ebavõrdse nurkkiirusega liigenditega
Joonis: 3 Kardaani skeem
ardani hingesid nimetatakse liigenditeks, mille abil edastatakse pöörlemine ühelt võllilt teisele koos võlli vahelise muutuva kaldenurgaga.
Ebavõrdse nurkkiirusega kardaanühendus (joonis 3) koosneb juhtivast 2 ja veetavast 4 kahvlist, mis on üksteisega ristlõikega 3 pööratavalt ühendatud. Veokahvel on jäigalt ühendatud veovõlliga 1 ja veokahvel on jäigalt ühendatud veovõlliga 6 (jäigalt või kasutades liikuvat splainiühendust 5). selle pikkuse muutmiseks). Pöördemoment võlli 1 kuni võlli 6 vahel, mille teljed asuvad nurga all , edastab hing ajamiga kahvli pöörlemise tagajärjel b-B telg ja ristid seoses a-A telg... Veovõll pöörleb aga ebaühtlaselt - kiirenduse ja aeglustusega. Selle tulemusena võivad ülekandes tekkida täiendavad dünaamilised koormused, mis mõnikord ületavad ülekantud pöördemomenti.
Lai rakendus kardaanmootorites koduautod sai jäigad lihtsad universaalliigendid nõelalaagritele. Selline hing koosneb kahest teraskahvlist ja nõellaagritega ristmikust, mis ühendab kahvlit pöördega (joonis 4). Ristmiku hoolikalt töödeldud tihvtidele paigaldatakse nõelalaagritega terasest tassid 13. Sisemisest otsast pärinevad kandenõelad toetuvad tugiseibile 11. Tass on ristmikule kinnitatud metallkorpuses 9 paigaldatud kummist tihendiga 10, mis asetatakse ristmikule. Prillidega ristmik kinnitatakse kahvlite 2 ja 4 kõrvadesse kinnitusrõngaste või kruvidega plaatide 6 abil. Ristlaagrid määritakse läbi tsentraalõlli 7, millest õli läheb ristkonstruktsioonis olevate kanalite kaudu laagritele. Liigse õlirõhu kõrvaldamiseks keeratakse ristkere külge kaitseklapiga 8 korpus.
Nõellaagrite kardaanühendusi kasutatakse avatud tüüpi ja need pole tavaliselt kaetud kaitsekatetega. Mõnel sõidukil on kardaanühendus saastumise kõrvaldamiseks varustatud kaitsekorgiga. Samuti kasutavad praegu paljud autod kardaanühendusi, mis ei vaja töö ajal sagedast perioodilist määrimist. Nad kasutavad määret, mida hoiab paigas usaldusväärne näärmetihend. Hingede otstes hinge või väikeste süvendite kokkupanemisel pannakse nõelalaagritega tassidesse rasv. Nendes hingedes pole määrdeliitmikke ega ventiile. Mõnikord hoitakse õlitajat või keermestatud auku, kuid õlitusseade puudub. Süstitud rasv täidab risti õõnsuse ja läheb laagritele ning selle ülejääk pigistatakse läbi kummist näärmete "voolu" tihendite.
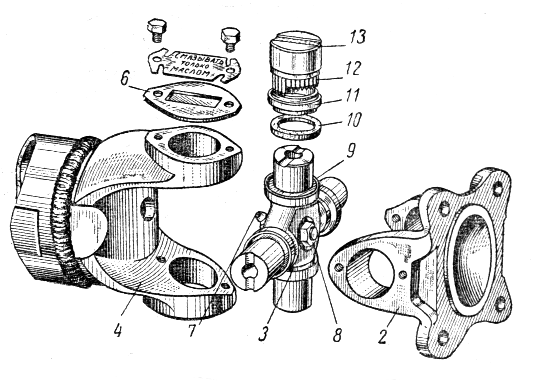
Joonis: 4 Andmed ebavõrdse nurkkiirusega kardaani kohta
tuleb märkida, et šahtide telgede vahelise nurga suurenemisega väheneb hinge efektiivsus järsult. Mõnes autos on selle nurga vähendamiseks mootor 2-3 kaldega. Vahel samal eesmärgil taga-sild seadke nii, et peaveovõll saaks kergelt kallutada.
Kuid on vastuvõetamatu vähendada võllidevahelist nurka nullini, kuna see võib viia hinge kiirele rikkele laagrinõelte silumisefekti tõttu pindadel, millega need kokku puutuvad.
Nõelte sillutamisefekt suureneb suure täieliku kliirensiga, kui kandenõelad on viltu ja tekivad kõrgsurve piigil. Arvatakse, et nõela kogu kliirens peaks olema väiksem kui pool kandenõela läbimõõdust. Kandenõelad on sobitatud samade tolerantsmõõtmetega. Üksikute nõelte ümberpaigutamine või asendamine ei ole lubatud.
Kardaanrist peab olema täiuslikult keskel. See saavutatakse klaaside 13 (vt joonis 4) täpse kinnitamisega, kasutades kinnitusrõngaid või katteid, mis on poltidega kinnitatud hinge kahvlite külge. Ristkeha piikide otste ja tasside põhja vahelise lõhe olemasolu on vastuvõetamatu, kuna see viib propelleri võlli muutuva tasakaalustamatuseni selle pöörlemise ajal. Samal ajal võib tasside üleliigne pingutamine põhjustada piikide otstes ja tasside põhjas nühkimist ning nõelte viltumist.
Joonis: 5 Kahe kardaanvõlli kardaan
Mõnel juhul on aksiaalne liikumine, mis kompenseerib propelleri võlli pikkuse muutust, eelistatav mitte varustatud ühendusega, vaid otse kardaani konstruktsiooniga - sellist hinge nimetatakse universaalseks. Joonisel 5 on kujutatud kahe universaalse liigendiga sõukruvi võll, võlli otsa auku surutakse õõnes tihvt 4, millele kaks sfäärilist rulli 1 on kinnitatud nõelalaagritele 2. Sfäärilise pinnaga tsentraalsed pistikud 3 on sfäärilise pinnaga. Hinge korpuses 5 on kaks silindrilise sektsiooni soont, mis on sama raadiusega kui rulli raadius. Nurga all pöörlemisel on tihvtil 4 lisaks pöörlemisele ümber oma telje võimalus kallutada ja libiseda sfäärilistel rullidel piki pilusid. Sellises hinges kaasnevad teljesuunalise liikumisega oluliselt väiksemad hõõrdekadud kui spline-ühenduses.
Joonis: 6 Kardaaniülekanne elastse poolkardaanühendusega
elastne poolkardaanliide võimaldab pöördemomendi ülekandmist ühelt võllilt teisele, mis asub teatud nurga all, mõlema võlli ühendava elastse lüli deformatsiooni tõttu. Elastne lüli võib olla kummist, kummist riidest või kummist, tugevdatud teraskaabliga. Viimasel juhul suudab poolkardaanühendus edastada märkimisväärset pöördemomenti ja veidi suurema nurga all kui kahel esimesel juhul. Poolkardaani liigese eelised on järgmised: dünaamiliste koormuste vähendamine ülekandes koos kiiruse järskude muutustega; töö ajal pole vaja hooldada. Oma elastsuse tõttu võimaldab selline hing propelleri võlli väikest aksiaalset liikumist. Elastne poolkardaanühendus peab olema tsentreeritud, vastasel juhul võib sõukruvi võlli tasakaal häiritud olla.

Elastse kardaanühenduse rakendamise näitena on joonisel 6 kujutatud auto VAZ-2105 kardaaniülekanne. Siin paigaldatakse vahepealse sõukruvi võlli esiotsale elastne poolkardaanühendus. Elastsel kuuskantlülil on kuus auku, mille sees metallist sisetükid on vulkaniseeritud. Enne kummilinki paigaldamist äärikute 1 ja 3 poltidele pingutatakse see esialgu perifeeria ümber metallklambriga, ilma milleta ei sobi sidestuse augud poltidega kokku (pärast kokkupanekut eemaldatakse klamber). Sel viisil on kummilink eelpingestatud. Kumm töötab kokkusurumisel paremini kui pinges, nii et see meede vähendab tõmbepinget, kui pöördemoment liigendi kaudu edastatakse.
Jäik poolkardaanühendus, mis on ühendus, mis kompenseerib paigaldamise ebatäpsusi, kasutatakse praegu äärmiselt harva. Selle põhjuseks on sellisele hingele omased puudused: kiire kulumine, töömahukas tootmine, töö ajal tekkiv müra.
Kardaanühendusi kasutatakse nurga all olevate kardaanirullide ühendamiseks. Kardaanvõllidel on toruosa ja otstest keevitatud otsad.
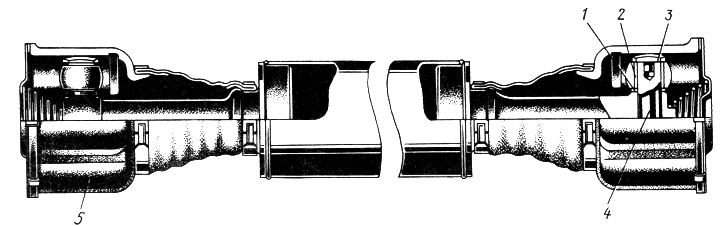
Topeltkardaanmootoris (st kahe kardaanliigendiga ja ühe võlliga käigul) keevitatakse torukujulise võlli 8 ühte otsa splainidega ots 5 (joonis 7, a) ja teise otsa kardaaniga 9 kahvliga teine \u200b\u200bots. Sõukruvi võll on otsaga 5 ühendatud kahvli 3 spline-rummu 4 külge. Ühe kardaanliigese libisev spline-ühendus võlli külge on vajalik võlli aksiaalseks nihutamiseks teljepidurvedrude deformeerumisel. Splineühendus määritakse õliga 2, mis on väljastpoolt kaitstud kaanega õlitihendiga 6 ja mustuse eest kaitstud kummist lõõtsaga 7. Kardaanide 1 ja 9 äärmised kahvlid on varustatud äärikutega, mis on poltidega kinnitatud võllide otstes olevate äärikute külge. Kui kardaani ülekanne on äärikuga, on seda lihtne ja mugav lahti võtta.
![]()
Joonis: 8 Elastse elemendiga vaheline tugi
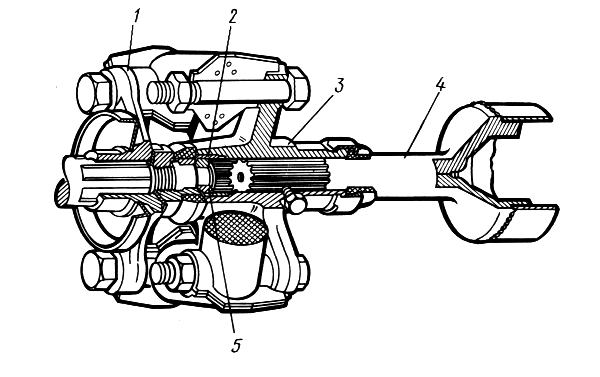
tagasillaveoga kaheteljelistel sõidukitel oli põhirakenduseks kardaanülekanne kahe kardaanvõlliga: põhi- ja vahepealne. Sellise ülekande korral on torukujulisel sõukruvi võllil 19 (joonis 7, b) mõlemas otsas kardaanühenduste kahvlitega keevitatud kõrvad 18. Tagumine kardaan ühendab võlli tagumise veotelje võlli külge. Esihark on kahvliga 16 ühendatud risti 17 abil, harutatud varrega 13, mis siseneb tagumisse otsa keevitatud varrukasse 12 vahevõll 11. Rihmaruumi õõnsus täidetakse õliga läbi õlitaja 21. Rasvapuks on varre külge tihendatud õlitihendiga 15, mille keermele on puksile keeratud kork. Lükandühendus on saastumise eest kaitstud kummist lõõtsaga 20. Vahevõlli 11 esiots on kardaanühenduse 10 abil ühendatud käigukasti väljundvõlliga. Vahevõll on paigaldatud sõiduki raami ristkinnitusele kinnitatud vahetoele 14.
Kardaani ülekande vahevõlli peatamiseks kasutatakse vahetoed. Vahevõlli tugi on tavaliselt valmistatud kuullaagri 1 kujul (joonis 8), mis on kinnitatud võlli sisemise rõngaga ja paigaldatud kummist padja 2, mis on kinnitatud sulgusse 4, mis on kinnitatud auto raami põiktala 3 külge. Laager on mõlemalt poolt suletud õlitihenditega varustatud korkidega 5, mille külgedel on mustuse suunajad 6. Laagri sisemine õõnsus täidetakse õliga 7 õliga.
Kolmeteljelistel sõidukitel, millel on autonoomne kardaanülekanne vahe- ja tagateljeni, on vaheteljele paigaldatud jäik vahetoe.
1.3. Kardaanmootorid liiguvad püsikiirusega.
Võrdse nurkkiirusega universaallülide kavandamine põhineb ühel põhimõttel: kokkupuutevalu, mille kaudu ümbermõõdulised jõud edastatakse, paiknevad võllide poolitustasandil. Püsikiirusega liigendeid kasutatakse reeglina vedavate ja samaaegselt juhitavate rataste ajamisel. Selliste hingede kujundus on mitmekesine. Allpool on mõned kõige sagedamini kasutatavad.
Nelja kuuliga universaalne liigend, millel on jaotussooned ("Weiss" tüüp). Joonis 9. Paigaldatud mitmetele kodumaistele autodele (UAZ-469, GAZ-66, ZIL-131) juhitavate veorataste ajamisse. Kui auto liigub edasi, edastab jõu üks pallipaar; tagurdamisel - teise paariga. Sõlmede 2 ja 3 sooned lõigatakse mööda raadiusega R 'kaare. Neli kuuli 6 paiknevad sümmeetriliselt asetsevate soonte 5 ristumiskohas - poolitaja tasapinnal, mis tagab võllide 1 ja 4 nurkkiiruste võrdsuse. Pall 7 on tsentreerunud. Seda hoiab nihutamise eest läbi selle läbiv tihvt, mis siseneb ühe rusika auku. Kuulid paigaldataks kõige täpsemini siis, kui need ristuvad soontega 90 nurga all, kuid kuulide libisemine tooks kaasa nii kuulide 6 kui 7 ja soonte 5 kiire kulumise ning hinge efektiivsuse vähenemise.
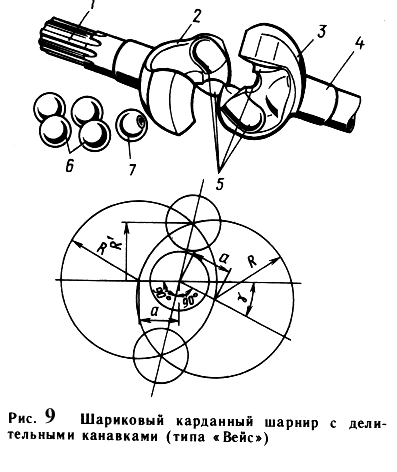
ringide ristumine väikese nurga all ei tagaks pallide täpsust poolitustasapinnal ja võib viia pallide ummistumiseni. Tavaliselt tehakse sooned nii, et soonte telge moodustava ringi keskpunkt asub hinge keskosast 0,4-0,45R kaugusel. Seda tüüpi kardaanühendused tagavad võllide nurga 30-32. Madalaim tootmise keerukus võrreldes teiste sünkroonsete universaallülitustega, disaini lihtsus ja odav tagas nende laia leviku. Hinge efektiivsus on üsna kõrge, kuna selles valitseb veerev hõõrdumine.
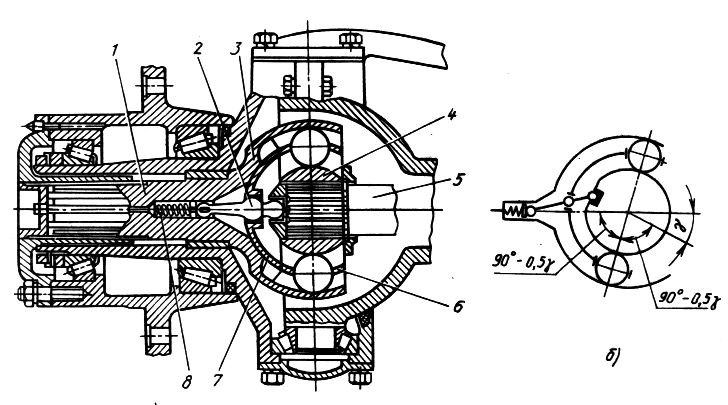
Joonis: 10 Pall-liigend indekseerimishoovaga (tüüp "Rcepp"): ja - hinge paigaldamine esivedu; b - hingediagramm
väärib märkimist selle hinge mõned omadused, mis piiravad selle kasutamise võimalust. Jõu ülekandmine teoreetiliselt punktkontakti ajal ainult kahe kuuli poolt põhjustab suuri kontaktpingeid. Seetõttu paigaldatakse nelja kuuliga kardaan tavaliselt sõidukitele, mille teljekoormus ei ületa 25-30 kN. Hinge toimimise ajal tekivad vahelae koormused, eriti kui hinge keskpunkt ei asu kuningatapi teljel. Pööra täpseks positsioneerimiseks on vaja spetsiaalseid tõukeseibe või laagreid.
Kulunud hinges võivad suurenenud pöördemomendi ülekandmise ajal kuulid, kui sõrmenukid on mõnevõrra deformeerunud, välja kukkuda, mis viib hinge kinnijäämise ja kontrolli kaotamiseni. Soonte keskosad on kõige vastuvõtlikumad kulumisele, mis vastab sirgjoonelisele liikumisele ja koormamata sooned kuluvad rohkem kui koormatud. Seda seletatakse asjaoluga, et hing on koormatud suhteliselt harva esisilla veotelje haardumisega raskeks sõitmiseks teeolud, ja suurem osa auto läbisõidust tekib siis, kui esisild on välja lülitatud, kui hinge koormatakse vastupidises suunas väikese, kuid pika toimega pöördemomendiga, mis takistab jõuülekande osa pöörlemist.
Kuuekuuliline universaallüli jagamiskangiga ("Rcepp" tüüp). Joonis 10. Selle hinge põhielemendid on sfääriline rusikas 4, mis on kinnitatud võlli 5 nurkadele, ja sfääriline tass 3, mis on ühendatud teise võlliga 1. Rusikal ja topsi siseküljel freesitakse kuus meridiaalset poolringikujulist soont. Sooned on valmistatud ühest keskusest. Soontes, mis on ühendatud eraldajaga 6, paiknevad kuus palli. Kui võllid on kallutatud, on pallid jaotuskangi 2 abil jagatud hoova 2 abil, mis pöörab juhikuppi 7, ja koos sellega ka eraldajat. Vedru 8 abil surutakse indekseerimishoob võlli 5 otsas asuva pistikupesa külge, kui kangi asend võlli kallutamise tagajärjel muutub.
Pallide positsioneerimistäpsus bisektoritasandil sõltub indekseerivate õlavarraste valikust. Joonis fig 10, b näitab hingeosade asendit, kui üks võllidest on nurga all kaldu. Vastavalt peaks separaator pöörama läbi nurga 0,5. Sellest lähtuvalt valitakse selline sammukangi õlgade suhe, mille korral tagatakse eraldaja etteantud pöördenurk.
Indekseerimiskangiga kardaan võimaldab võlli vahel maksimaalselt 37 nurka. Kuna selles ühenduses olevat jõudu edastab kuus kuuli, tagab see väikese pöördemomendi korral suure pöördemomendi ülekande. Liigendil ei ole tõukekoormusi, kui viimase keskpunkt langeb kokku pöördteljega. Hingel on suur töökindlus, kõrge efektiivsus, kuid see on tehnoloogiliselt keeruline: kõik selle osad pööratakse ja freesitakse rangete tolerantside kohaselt, tagades jõudude ülekande kõigi pallide poolt. Sel põhjusel on hinge maksumus kõrge.
Kuue kuuliga jagamissoontega universaalne liigend (tüüp "Bearfield"). Joonis 11. Rusikal 4, mille pind on tehtud mööda raadiusega R1 (keskosa O) kera, freesitakse kuus soonte. Sõlme soontel on muutuv sügavus, kuna need on lõigatud mööda raadiust R3 (keskpunkt O1 nihutatakse hinge O keskosast a kaugusel). Korpuse 1 sisepind on tehtud piki sfääri raadiusega R2 (keskosa O), sellel on ka kuus muutuva sügavusega soonte, mis on lõigatud mööda raadiust R4 (keskpunkt O2 on nihutatud hinge o keskosast ka kauguse a abil). Separaatoril 3, milles kuulid 2 asuvad, on välimine ja sisepind, mis on valmistatud vastavalt raadiusega R2 ja R1 kuuli. Asendis, kus liigendi võllid on koaksiaalsed, asuvad kuulid tasapinnas, mis on risti vuugi telgedega, mis läbivad liigendi keskosa.

Joonis: 11 Kuuekuuliline universaallüli (Bearfieldi tüüp):
ja - Ehitus; b - skeemid.
kui üks võllidest 5 on teatud nurga all kallutatud, lükatakse ülemine pall soonte kitsenevast ruumist välja paremale ja alumine pall liigutatakse separaatori abil vasakul olevate soonte laienevasse ruumi. Kuulide keskpunktid on alati soontelgede ristumiskohas. See tagab nende asukoha bisektoritasandil, mis on võllide sünkroonse pöörlemise tingimus. Kuulide kinnijäämise vältimiseks ei tohiks soonte telgede ristumisnurk olla väiksem kui 1120 '.
Erinevalt jagamiskangiga universaallülist ei tehta selles ühenduses sooneosa profiili mitte mööda kaare ringi, vaid mööda ellipsi. Tänu sellele moodustavad soone seinte ja kuuli vastasmõju vertikaaliga 45 nurga, mis kaitseb soonte servi muljumise ja purunemise eest. Indekseerimishoova puudumine võimaldab sellel liigendil töötada võllide vahel 45 ° nurga all. Suhteliselt suured kaod võllide vahel suure nurga all olevas hinges on seletatavad asjaoluga, et koos veereva hõõrdumisega on sellele iseloomulik libisev hõõrdumine.
Joonis: 14 kolmeharuline jäik kardaan (statiivi tüüp)
liigend on paigaldatud mõnede kodumajapidamises kasutatavate sõiduautode (VAZ-2108) esi- ja veorataste veovõllile veovõlli välimisse otsa. Sellisel juhul tuleb kardaani sisemisse otsa paigaldada kardaan, mis võimaldab kompenseerida vedrude deformeerumisel kardaani pikkuse muutust.
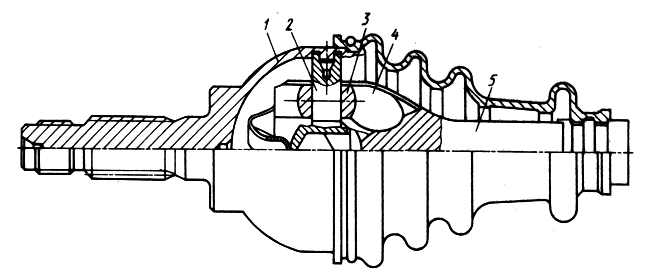
Universaalne kuue kuuliga kardaan (tüüp GKN). Joonis 12. Hinge silindrikujulise kere sisepinnale lõigatakse kuus elliptilise sektsiooni pikisoonet, samad sooned on sõlme sfäärilisel pinnal paralleelselt võlli pikiteljega. Sooned sisaldavad separaatorisse paigaldatud kuulikomplekti. Rusika ja eraldaja vastastikmõjutavad pinnad on sfäärilised, sfääri raadius on R1 (keskpunkt O1 keskusest O kaugusel, mis asub pallide keskpunktide tasapinnal). Puuri sfääriline välimine osa (raadius R2) muutub kooniliseks, mis piirab võlli maksimaalset kaldenurka umbes 20-ni.
Puuri kerade keskpunktide nihkumise tagajärjel on pallid sättitud ja fikseeritud poolitaja tasapinnale, kui võll on kallutatud. Seda seletatakse asjaoluga, et võlli kallutamisel peab pall liikuma kahe tsentri O1 ja O2 suhtes, mis sunnib kuuli paigaldama ristmikule vertikaaltasapinnal, mis läbib palli keskpunkti, separaatori välimist ja sisemist kera.
Aksiaalne liikumine toimub piki kere pikisooni ja propelleri võlli liikumine on võrdne kere soonte tööpikkusega, mis mõjutab hinge mõõtmeid. Aksiaalsete liikumiste ajal pallid ei veere, vaid libisevad, mis vähendab hinge efektiivsust. Nii valmistatakse esiveoliste VAZ-autode sisemine hing. Suurte pöördemomentide edastamisel kasutatakse seda tüüpi kaheksa kuuliga liigendit.

Joonis: 15 Kolmetihviline universaallüli (statiivi tüüp)
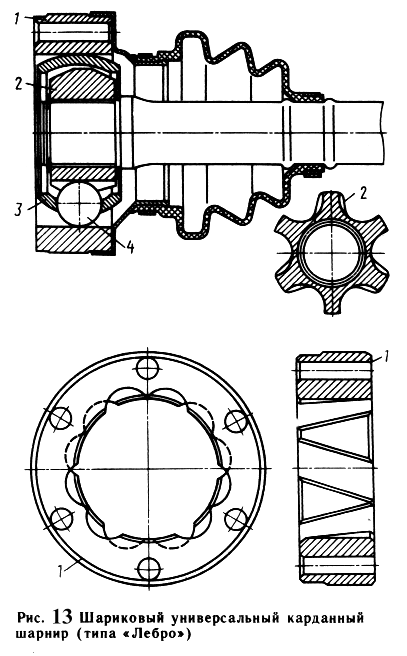
universaalne kuue kuuliga universaalne liigend jagunevate soontega (tüüp "Lebro"). Joonis 13. Hing koosneb silindrilisest korpusest 1, mille sisepinnal lõigatakse joonisel näidatud järjekorras paigutatud kuus sirget silindri generaatori suhtes nurka; sfääriline rusikas 2, selle pinnale lõigatakse ka kuus sirget soont; pallidega 4 eraldaja 3, mille keskpunkt on sfääriline välispind piki korpuse 1 sisemist silindrilist pinda ja sisemine sfääriline pind, on paigaldatud kindla vahega sõrmikule 2. Kuulid on paigaldatud soonte ristumiskohtadesse, mis tagab võlli sünkroonse pöörlemise, kuna kuulid, olenemata nende vahel olevast nurgast võllid on alati poolitaja tasapinnas.
See liigend on väiksem kui muud tüüpi vuugid, kuna soonte ja pikkuse töö pikkus on 2 korda väiksem kui võlli käik. On ka muid eeliseid: puur ei täida võlli vahelise nurga jagamise funktsiooni, see on vähem koormatud ja seetõttu on nõuded selle valmistamise täpsusele madalamad; hinge äärikuühenduse olemasolu tagab
Joonis: 16 Topeltkardaan
paigalduse kvaliteet, kuigi selle disain muutub keerulisemaks, mis kandis
kui palju kompenseerib keha soone tõmbamise lihtsustamist. Soone asukoha täpsusele esitatakse kõrged nõudmised.
Hingel on kõrge kasutegur ja seda kasutatakse esiveolistel sõidukitel.
Kolme naastuga kardaan (statiivi tüüp). Sellised kardaanühendused paigaldatakse kergeveokitele ja veoautodele. Struktuurselt on nendel hingedel kaks kujundust: hinged, mis võimaldavad momendi ülekandmist kuni 43 sh telgede vahelistes nurkades, kuid ei võimalda aksiaalset nihet (jäigad hinged) ja universaalsed hinged, mis võimaldavad aksiaalset kompenseerimist, kuid töötavad võllide vahel suhteliselt väikeste nurkadega.
Jäigas hinges (joonis 14) on naastud 2, mis asuvad 120 ° nurga all, fikseeritud korpusesse 1. Sfäärilise pinnaga rullid 3 on kinnitatud naastudele ja saavad neil vabalt pöörelda. Kahvlil 4, mis on valmistatud koos võlliga 5, on kolm silindrikujulist soonet. Kahvli pind on sfääriline, mis annab võllide vahele suure nurga.
Jäikade ja universaalsete liigeste tööpõhimõte on sama. Kolme naastuga universaalne liigend (joonis 15) koosneb silindrilisest korpusest 3, mis on valmistatud ühes tükis koos võlliga, milles on kolm pikisoonet, kolme naastuga rummus 2, mis on kinnitatud sõukruvi võlli sisemisse otsa, kolmest rullist 1 nõela laagritel. Piigid, nagu sooned, asuvad üksteise suhtes 120 nurga all. Rullidel on sfääriline pind, mis on sama raadiusega kui pikisoonte silindriline sektsioon. Kui võllid pöörlevad nurga all, rulluvad rullid soontes, keerates nõelalaagrid sisse ja samal ajal saavad tihvtid liikuda piki laagrirulle, mille tagab hinge kinemaatika. Pikendus saavutatakse naastude libistamisega mööda laagreid.
Seda tüüpi kardaani saab kasutada, kui võlli maksimaalne kaldenurk ei ületa 25. Hinge eeliseks on väikesed kaod teljesuunalise liikumise ajal, kuna see tagatakse praktiliselt ainult rullimisega, mis määrab hinge kõrge efektiivsuse.
Topeltkardaanühendus. Joonis 16. See koosneb kahest ebavõrdse nurkkiirusega liigendist 1, mida ühendab topeltkahvel 2. Nurkkiiruste võrdsus tuleb tagada indekseerimishoovaga. Konstruktsiooniliste omaduste tõttu on ühendatavate võllide sünkroonset pöörlemist võimalik saavutada vaid mõningase ligikaudsusega. Ebaühtlase pöörlemise koefitsient sõltub võllide vahelisest nurgast ja jaotusseadme suurusest.
Nõellaagrite topeltvõlli iseloomustab nende laagrite ja põikpuude naastude märkimisväärne kulumine. Selle põhjuseks on asjaolu, et sõiduki valdavalt sirgjoonelise liikumise tõttu laagrinõelad ei veere, mille tagajärjel nende osade pinnad, millega nad kokku puutuvad, on altid silindriliseks ja nõelad ise mõnikord lamestuvad.
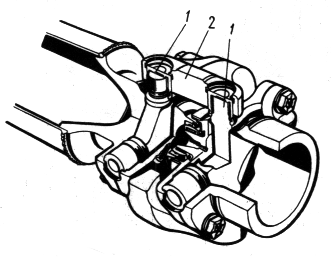
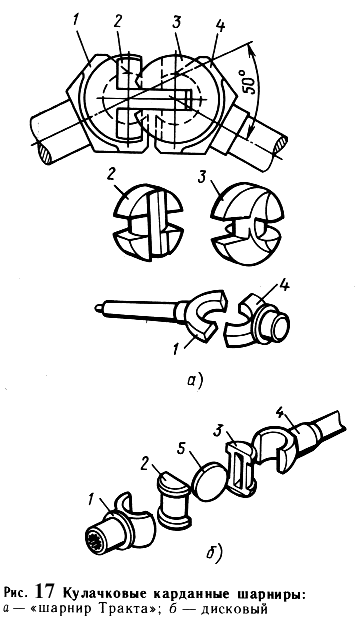
Nukk-kardaan. Joonis 17. Nukkliiteid kasutatakse raskeveokitel ja need juhivad rattaid. Kui jagame nukk-kardaan piki sümmeetriatelge kaheks osaks, siis on kumbki osa fikseeritud veeretelgedega ebavõrdse nurkkiirusega kardaan (täpselt nagu kahekordne kardaan). Vastastikmõjuvate osade arenenud pindade olemasolu tõttu on hing võimeline edastama märkimisväärset kogust pöördemomenti, tagades samal ajal võlli vahelise nurga 45-50.
Välisriikide raskeveokitel kasutatakse laialdaselt nukk-kardaani liigendit, mis on näidatud joonisel 17 a, mida nimetatakse "traktori hingeks". See koosneb neljast tembeldatud osast: kahest kahvlist 1 ja 4 ning kahest vormitud rusikast 2 ja 3, mille hõõrumispinnad lihvitakse.
Meie riigis töötati välja nukk-kardaan (joonis 17, b), mis on paigaldatud mitmele sõidukile (KamAZ-4310, Ural-4320, KAZ-4540, KrAZ-260 jne). Hing koosneb viiest lihtsast konfiguratsiooniosast: kahest kahvlist 1 ja 4, kahest käepidemest 2 ja 3 ning ketast 5, seetõttu nimetatakse seda sageli ketasühenduseks. Selle valmistamise keerukus võrreldes "Tract hinge" keerukusega on mõnevõrra suur. Selle ühendi abil pakutava võlli vahelise nurga maksimaalne väärtus on 45.
Nukkliigendite efektiivsus on madalam kui teiste võrdse nurkkiirusega vuukide kasutegur, kuna nende elementidele on iseloomulik libisev hõõrdumine. Töötamisel on mitterahuldava etteandmise tagajärjel märkimisväärne kuumenemine ja mõnikord hingeosade küürimine määrdeaine hõõrdepinnale.
1.4. Jõuülekande põhiosade materjalid
Ebavõrdse nurkkiirusega kardaanühenduste lükandkahvlid on valmistatud terasest 30X ja 40 (GAZ) või terasest 45 (ZIL), keevitatud on terasest 40 (GAZ) või 35 (ZIL) ja seejärel HFC-ga karastatud. Ristid on tembeldatud terasest 20X (GAZ) või terasest 18ХГТ ja 20ХГНТР (ZIL), kahest esimesest terasest valmistatud ristid on tsementeeritud, terasest 20ХГНТР ristid allutatakse nitrokarbureerimisele. Kardaanvõllid on valmistatud terasest õhukese seinaga kardaantorudest (teras 15A või 20) ja nende piluotsad on terasest 30, 40X või 45G2.
1.5. Prototüübi valimine
Autol GAZ-2410 on tagatelg vedav. Kardaanmootor peab edastama pöördemomendi sõiduki esiotsas asuva käigukasti väljundvõllilt tagatelje põhiajamile. Tagatelje reaktiivmomenti tajuvad vedrud. Seetõttu on suletud kardaani ülekande kasutamine ebapraktiline. Ajamiga veetavate rataste ajamites kasutatakse võrdse nurkkiirusega hingesid, seetõttu kasutatakse sel juhul lihtsaid ebavõrdse nurkkiirusega hingesid koos nõellaagrite ristkehadega. Auto ei ole pikk teljevahe, kaugus käigukasti väljundvõllist põhikäiguni on väike, seega on võimalik kasutada kardaani, millel on üks kardaan ilma vahepealseta
Joonis: kaheksateist. Kinemaatiline diagramm jõuülekande prototüüp
koetugi. Kardaanühenduste arv on kaks (võlli otstes). Seega tagatakse peaajami hammasratta pöörlemise ühtlus. Samuti on vaja hüvitada käigukasti ja põhikäigu vaheline muutus, mis tekib vedrustuse tagatelje vibratsiooni tõttu sõiduki liikumisel. Kardaani ülekande ja käigukasti väljundvõlli ristmikul on mugav teha kompenseeriv splineühendus. Kardaani käigukasti kinnitamine tagatelje veomehhanismile käigukasti hõlpsaks eemaldamiseks / paigaldamiseks on äärik.
Seega valitakse prototüübiks kahekordse liigendiga kardaaniülekanne, millel on lihtsad ebavõrdse nurkkiirusega kardaaniliigendid koos ristkividega nõelalaagritel, millel on üks kardaan ilma vahetoeta. Kompenseerivaks elemendiks on kardaani jõuülekanne koos käigukasti väljundvõlliga. Kinemaatiline diagramm on näidatud joonisel 18.
2. Auto GAZ-2410 kardaani ülekande arvutamise kontrollimine
Kardaani ülekande kontrollarvutus viiakse läbi järgmises järjestuses:
koormusrežiim on seatud;
määratakse propelleri võlli maksimaalne väändepinge ja keerdenurk;
määratakse propelleri võllile mõjuv aksiaaljõud;
hinnatakse sõukruvi võlli ebaühtlast pöörlemist ja ebaühtlasest pöörlemisest tulenevat inertsimomenti;
arvutatakse kardaani ristmik;
arvutatakse universaalkahvel;
määratakse nõela laagrile mõjuvad lubatud jõud;
määratakse propelleri võlli pöörete kriitiline arv;
viiakse läbi kardaani termiline arvutus.
2.1. Laadimisrežiimid
Sõukruvi võlli mõjutavad käigukastist edastatav pöördemoment ja vedrude veotelje vibratsioonist tulenevad aksiaalsed jõud. Pöörlemiskiiruse suurenemisel võivad tekkida sõukruvi võlli külgmised vibratsioonid. Võlli põiksuunaline painutamine toimub tsentrifugaaljõudude tõttu, mis tulenevad võlli pöörlemistelje ja raskuskeskme mittevastavusest. Mittevastavus võib ilmneda vältimatute tootmisprobleemide, võlli läbipainde tõttu oma kaalu tõttu ja muudel põhjustel.
Selles töös tehakse kardaani ülekande kontrollarvutus vastavalt mootori väljatöötatud maksimaalsele pöördemomendile - Mmax pöörlemiskiirusel nM - kui auto liigub esimesel käigul, kui jõuülekande kaudu edastatav pöördemoment on maksimaalne ( suhe esimene käik i1 \u003d 3,5). Mootori maksimaalset nimimomenti (173 Nm kiirusel 2500 p / min) projekteerimisel suurendatakse 1,5 korda, seega on arvutatud pöördemoment Mmax \u003d 173 1,5 \u003d 259,5 Nm; nM \u003d 2500 p / min.
2.2. Propelleri võlli pöördepinge ja pöördenurga määramine
Võlli maksimaalne väändepinge, nagu eespool märgitud, määratakse kindlaks juhul, kui rakendatakse mootori maksimaalset pöördemomenti ja dünaamiliste koormuste mõjul. Dünaamiliste koormuste mõju võtab arvesse dünaamiline tegur: KD \u003d 1 ... 3. Arvutamisel võtame KD \u003d 1.
Auto GAZ-2410 kardaan on õõnes. Võlli välisläbimõõt on D \u003d 74 mm, võlli siseläbimõõt on d \u003d 71 mm.
Torsioonile vastupidavuse hetk määratakse valemiga
Võlli maksimaalne väändepinge määratakse valemiga
Kardaanmehhanismide konstruktsioonide väändepingete väärtus on 100 ... 300 MPa. Saadud pinge väärtus ei ületa määratud väärtusi.
Võlli keeramisnurga väärtus määratakse valemiga
kus G on väände elastsusmoodul, G \u003d 8,5-1010 Pa;
Iкр - võlliosa inertsimoment väände ajal,
l on sõukruvi võlli pikkus, l \u003d 1,299 m.
Kardaanvõlli pikkuse keerdenurga väärtus on
 .
.
Kardaanvõlli valmistatud konstruktsioonide torsiooninurkade väärtused on KD \u003d 1 3 kuni 9 kraadi võlli pikkuse meetri kohta. Saadud väärtus ei ületa määratud väärtusi.
Seega tagatakse kardaanvõlli normaalne töö maksimaalse väändepinge ja keerdenurga osas.
2.3. Propelleri võllile mõjuva telgjõu määramine
Lisaks pöördemomendile mõjutavad sõukruvi võlli aksiaalsed jõud Q, mis tulenevad veotelje liikumistest.
Tagatelg, kui sõiduk liigub muhkude kohal, kõigub teatud raadiuses R1 vedru siduri telje suhtes. Kardaanvõlli võnkumine toimub kardaani keskosa ümber, millega see on ühendatud teatud raadiusega R2 käigukasti sekundaarteljega. Nende raadiuste ebavõrdsuse tõttu tekivad sõukruvi võlli aksiaalsed liikumised. Aksiaalsete nihete väärtus on valitsevates töörežiimides 2-5 mm.
Sõiduki vibratsiooni ajal propellivõllile mõjuva telgjõu Q suurus määratakse valemiga
![]() ,
,
kus Dsh ja dsh on pilude läbimõõdud piki eendeid ja süvendeid;
- hõõrdetegur splainiühenduses.

Joonis: 19 Kardaani ajamskeem võllide ebaühtlase pöörlemise hindamiseks
koefitsient sõltub määrdeaine kvaliteedist. Hea määrimisega \u003d 0,04 ... 0,6 (arvutamisel võtame 0,05); halva määrimisega \u003d 0,11 ... 0,12 (arvutustes võtame 0,115). Sisselülitamise korral \u003d 0,4 ... 0,45 (arvestuses võtame 0,45). GAZ-2410 auto kardaanmootori harutatud ühendamiseks Dsh \u003d 28 mm, dsh \u003d 25 mm.
Siis on telgjõu väärtused:
hea määrimisega  ;
;
halva määrimisega  ;
;
ummikus  .
.
Kardaanmootoris toimuvad teljesuunalised jõud koormavad käigukasti ja viimase ajami laagreid. Aksiaalkoormuse vähenemine toimub siis, kui on olemas liitekoht, milles libisev hõõrdumine aksiaalse liikumise ajal asendatakse veereva hõõrdumisega (pallidega spinnid).
2.4. Pöörlemise ja inertsmomendi ebaühtluse hindamine
Ühe kardaanühenduse puhul, mis ühendab käigukasti (võlli A) ja kardaani (võlli B) väljundvõlli, võib võlli pöördenurkade ja ratio (vt joonis 19) suhet väljendada väljendiga
 .
.
Siin on 1 vaadeldavate võllide telgede vaheline nurk (kaldenurk). Selle avaldise eristamisel saame
Võllide nurkkiirused tuletatakse pöördenurgast ajas. Seda silmas pidades saate eelmise avaldise põhjal saada võlli nurkkiiruste suhte:
 .
.
Pärast algebralisi teisendusi saame veetava võlli B nurkkiiruse sõltuvuse veovõlli A nurkkiirusest, veovõlli pöördenurgast ja võlli vale nurga all:
 .
.
See sõltuvus tähendab, et A \u003d B ainult siis, kui 1 \u003d 0. Üldjuhul 1 0, see tähendab võlli A ühtlase pöörlemiskiiruse juures pöörleb võll B ebaühtlaselt. Väärtuste значенияA ja B vahe sõltub võllide angle1 vahelisest nurgast. Võlli A pöördenurga seadistamise abil on võimalik hinnata võlli B ebaühtlast pöörlemist võllide vahel püsiva nurga all ja veovõlli konstantsel pöörlemiskiirusel.
Nagu eespool märgitud, arvutatakse jõuülekanne maksimaalse pöördemomendi korral. Mootor arendab maksimaalset pöördemomenti nM \u003d 2500 p / min. Maksimaalne pöördemoment edastatakse jõuülekande kaudu, kui esimene käik on sisse lülitatud. Nendes tingimustes määratakse veovõlli A pöörlemiskiirus valemiga
 .
.
Võtame šahtide maksimaalse nihkumisnurga - --1 \u003d 3.
Joonis 20 Nurkkiiruse sõltuvuse graafikud kardaanivõllid veovõlli pöördenurga alt
võlli B nurkkiiruse väärtused sõltuvalt võlli A pöördenurgast on esitatud tabelis 1. Sõltuvuse graafik on joonisel 20.
Tabel 1.
Kardaanvõlli nurkkiiruse väärtus veovõlli erinevatel pöördenurkadel.
|
grad. |
|||||||||
Võllide B ja C pöördenurkade suhe on
 .
.
Tõestagem, et kui šahtide nihked on võrdsed, s.t. kui 1 \u003d 2, on ka võllide A ja C nurkkiirused võrdsed. Võttes arvesse võlli B kahvlite asukohta ja hingede juhtivate kahvlite nihkumist üksteise suhtes 90 °, saame, lugedes pöördenurka võlli A asendist,
Või  .
.
Võttes seda arvesse  , leiame saadud avaldise põhjal võlli A ja võlli C pöördenurkade suhte:
, leiame saadud avaldise põhjal võlli A ja võlli C pöördenurkade suhte:
 .
.
Sellest sõltuvusest nähtub, et kui 1 \u003d 2,  ja seega \u003d . Seega tagatakse peakäigukasti ajami hammasratta pöörlemise ühtlus käigukasti sekundaartelje ühtlase pöörlemisega, kuigi propelleri võll ise, mille kaudu pöördemoment edastatakse, pöörleb ebaühtlaselt.
ja seega \u003d . Seega tagatakse peakäigukasti ajami hammasratta pöörlemise ühtlus käigukasti sekundaartelje ühtlase pöörlemisega, kuigi propelleri võll ise, mille kaudu pöördemoment edastatakse, pöörleb ebaühtlaselt.
Kui auto liigub, koormatakse ebaühtlase pöörlemise tõttu võlli B täiendavalt inertsmoment
 ,
,
kus IA ja IB on pöörlevate osade inertsimomendid, vähendatuna vastavalt võllidele A ja B.
2
Joonis: 21 Kardaanülekandekonstruktsiooni skeem
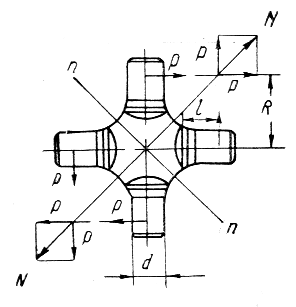
.viis. Kardaaniristi arvutamine
Jõud P mõjub kardaaniristi ristnurgale (joonis 21). Selle jõu suurus määratakse valemiga
![]() ,
,
kus R on kaugus ristteljest kuni okka keskpaigani, R \u003d 33 mm.
Jõud P mõjub piigitõmbele, põhjustades selle muljumise, painutamise ja nihutamise. Piigi varisemispinge ei tohiks ületada 80 MPa, painutuspinge - 350 MPa, nihkepinge - 170 MPa.
Nihkepinge määratakse valemiga
kus d on piigi läbimõõt, d \u003d 16 mm;
l on okka pikkus, l \u003d 13 mm.
Piigi ristlõike painutusele vastupidavuse hetk määratakse valemiga
Painutuspinge
Katkestuspinge
Nagu näete, ei ületa kõik pinged lubatud väärtusi.
Tihvtidele rakendatud jõud P annavad ka tulemuseks N, mis põhjustab tõmbepingeid n-n sektsioonis. GAZ-2410 universaallüli ristlõike ristlõikepindala, kus need pinged tekivad, on F \u003d 4,9 cm2. Tõmbepinged määratakse valemiga
Lubatav tõmbepinge on 120 MPa. Tegelik pinge ei ületa lubatut. Tagatakse universaalse liigendristi tihvtide normaalne töö purustamiseks, painutamiseks, lõikamiseks ja liigendi rist pinges.
2
Joonis: 22 Kardaani arvutamise skeem.
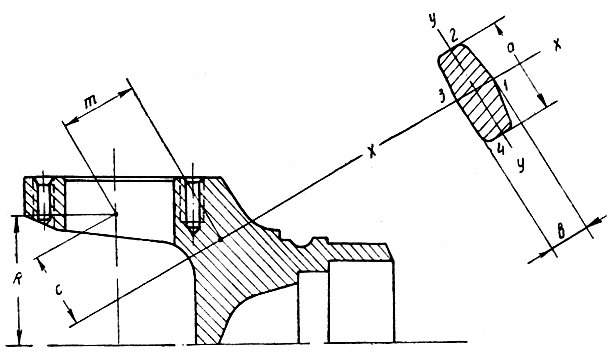
.6. Kardaaniharu arvutamine
Kardaaniharu arvutamise kontrollimisel valitakse kahvlijala nõrk sektsioon. Kardaani kahvli arvutamise skeem on toodud joonisel 22. Käpp tajub ristmiku piigi jõudu P. Selle jõu mõjul tekivad paindumis- ja väändepinged üheaegselt käpa ristkülikukujulisele lõigule.
Joonise järgi määratud sektsiooni pikkus ja laius on vastavalt võrdsed a \u003d 45 mm, b \u003d 15 mm. Jõude toimimise õlad on võrdsed c \u003d 21 mm, m \u003d 3 mm. Lõigu takistusmomentide määramiseks vajalik koefitsient sõltub sektsiooni pikkuse ja laiuse suhtest. Antud sektsiooni (a / b \u003d 3) korral \u003d 0,268.
Kardaani käpa vaadeldavas osas toimivate pingete kindlakstegemiseks on vaja kindlaks määrata sektsioonide takistusmomendid.
Lõigu vastupanumõõt x-x-telje ümber paindumisele (vt joonis 22)
Vastupidavuse hetk paindumisele ümber y-y telje
Pöördekindluse hetk punktide 1 ja 3 pingete määramisel
Pöördekindluse hetk punktide 2 ja 4 pingete määramisel
Painutuspinge punktides 2 ja 4
Painutuspinge punktides 1 ja 3
Pöördepinge punktides 2 ja 4
Pöördepinge punktides 1 ja 3
Suurimad tekkivad pinged lõigu vaadeldavates punktides määratakse materjalide takistuse deformatsioonienergia teooria abil (4. tugevuse teooria). Selle teooria kohaselt on suurim painutusest ja torsioonist tulenev pinge punktides 1 ja 3
Suurim pinge punktides 2 ja 4
Valmis konstruktsioonide lubatud pingete väärtused on [] \u003d 50 ... 150 MPa. Nagu näete, on punktides 1 ja 3 tegelikud pinged väljaspool lubatud piire. Varustama tavaline töö universaalkahvlite jaoks on vaja vähendada selle ristlõikes mõjuvaid pingeid. Seda on võimalik saavutada sektsiooni mõõtmete suurendamise, näiteks selle laiuse b suurendamise teel. Punktides 1 ja 3 painutamisest ja väändumisest tuleneva suurima pinge valemi põhjal saate sektsiooni laiuse valimiseks järgmise valemi:
 .
.
Võtame stressi, mis tuleb anda lõigu punktides 1 ja 3, [] \u003d 140 MPa. Siis b väärtus on 16,9 mm. See tähendab, et universaalkahvli normaalse töö tagamiseks tuleb selle käpa sektsiooni laiust suurendada 2 mm võrra.
2.7. Nõela laagrile mõjuva lubatud jõu määramine
Lubatav pingutus määratakse valemiga
 ,
,
kus i on rullide või nõelte arv, i \u003d 29;
l on rulli tööpikkus, l \u003d 1,4 cm;
d - rulli läbimõõt, d \u003d 0,2 cm;
k on kõvaduse parandustegur. Koos Rockwelli andmetega 59-60 laagri korpuse ja rullide endi piigi veerepindade kõvadusega k \u003d 1.
Naadi pöörete arv minutis määratakse valemiga (propellervõlli telgede vahelise nurga jaoks \u003d 3)
 .
.
Siis on lubatud pingutus võrdne
Punktis 2.5. määrati piigile mõjuv tegelik jõud. See kandub kardaanikardasse ja koormab nõela laagrit. Selle väärtus (P \u003d 13,8 kN) ei ületa nõelalaagrit koormava jõu teatud lubatud väärtust. Seetõttu on laagri normaalne töö tagatud.
2.8. Propelleri võlli pöörete kriitilise arvu arvutamine
Kui võll pöörleb tsentrifugaaljõudude tõttu, mis tulenevad isegi võlli pöörlemistelje ja raskuskeskme väikesest mittevastavusest, võib tekkida võlli külgsuunaline kadu. Kui pöörlemiskiirus läheneb kriitilisele, suureneb võlli külgvibratsioonide amplituud ja võll võib puruneda. Seetõttu on kardaan tootmise ajal tasakaalus.
Kriitilise nurkkiiruse кр väärtust mõjutavad:
tugede võlli pigistamise olemus;
vuugide ja laagrite tühikute suurus;
osade vale joondamine;
toru ümarus ja seina paksus ning mitmed muud tegurid.
Pideva ristlõikega võlli jaoks, mille ühtlane jaotuv koormus on võrdne tema enda kaaluga ja vabalt lamades tugedel, mis ei taju painutusmomente
 ,
,
kus l on tugede vaheline võlli pikkus, l \u003d 1,299 m;
E - elastsusmoodul, E \u003d 21011 N / m2;
I - võlliosa inertsimoment;
m on võlli pikkuse ühiku mass.
Võttes seda arvesse  Mis siis
Mis siis  (D, d on võlli õõnesosa välis- ja siseläbimõõt vastavalt 75 mm ja 71 mm), saame kriitilise nurkkiiruse määramiseks järgmise valemi
(D, d on võlli õõnesosa välis- ja siseläbimõõt vastavalt 75 mm ja 71 mm), saame kriitilise nurkkiiruse määramiseks järgmise valemi
 .
.
Seejärel määratakse propelleri võlli kriitiline kiirus
Propellervõlli normaalseks tööks on vajalik, et järgmine tingimus oleks täidetud ncr (1,15 ... 1,2) nmax. Siin on nmax propelleri võlli suurim pöörlemiskiirus. See võrdub mootori maksimaalse pöörlemissagedusega, mis on GAZ-2410 puhul umbes 5000 pööret minutis. Seega ei tohiks ncr olla väiksem kui 5750 ... 6000 p / min. Nagu näete, on see tingimus täidetud ja kardaani ülekande normaalne töö on tagatud.
2.9. Kardaani termiline arvutus
Kardaantappide hõõrdumine põhjustab selle kuumenemist. Soojusbilansi võrrandit saab esitada järgmisel kujul:
kus L on kardaanvõlli toiteallikas, J / s;
dt on kardaani tööaeg, s;
m on detaili mass, kg;
c - detailmaterjali erisoojusvõimsus (terase korral c \u003d 500 J / (kgC));
k on soojusülekandetegur selles arvutuses k \u003d 42 J / (m2sС);
F '' - kuumutatud osade jahutuspind, m2;
- kardaanühenduse T1 kuumutatud osade temperatuuri ja välisõhu T2 temperatuuri vahe, С;
d - kardaanühenduse kuumutatud osade temperatuuri tõus, С.
Soojusbilansi võrrandist on näha, et üks osa hõõrdetöö tõttu kardaaniliigendisse tarnitavast soojusest kulub kardaani liigendosade kuumutamisele. Teine osa sellest kantakse keskkonda. Termilise arvutuse eesmärk on määrata kardaanühenduse osade kuumutamine sõltuvalt tööajast. Selle kuumutamise määrab väärtus \u003d T1 - T2. Enne hinge tööle hakkamist võetakse selle osade temperatuur võrdseks ümbritseva temperatuuriga. Teades kütte hulka ja ümbritseva õhu temperatuuri, saate määrata hingeosade tegeliku temperatuuri.
Enne soojusbilansi võrrandi koostamist on vaja leida kardaanühenduse osade jahutuspinna pindala. Selle piirkonna määramise skeemid on toodud joonisel 23.
Jahutuspinna piirkonnad on määratletud lihtsate lameda geomeetrilise kujuga aladena. Nad moodustavad:
välimine põsepiirkond Sout. n. \u003d 0,00198 m2;
sisemise põse piirkond Sint. n. \u003d 0,00156 m2;
külgmine põsepiirkond S-külg. n. \u003d 0,0006 m2;
ristkrossi poole pinna pindala. \u003d 0,0009 m2.
Joonis: 23 Kardaani kuumutatud osade soojusülekandepinnad:
ja) -kahvli välimine põsk; b)- kahvli sisepõsk; juures)- kahvli külgpõsk; d)- ristik.
kardaani liigendosade jahutuspinna kogupinna määramisel tuleb arvestada, et kahvli sisepõske pinda ei kasutata täielikult soojusülekandeks, kuna see hõlmab ristkeha piiki nõela laagril. Kanderaadius on R \u003d 15 mm. Siis määratakse kogu pindala
Samuti on soojusbilansi võrrandi koostamiseks vaja osade massi, kuhu kantakse osa hinges hõõrdumisel tekkivast soojusest. Risti kaal, mis on määratud selle tööjoonise järgi, on mcross. \u003d 0,278 kg. Kahvlipõse massi saab määrata valemiga ( \u003d 7800 kg / m3 - osade materjali tihedus)
Osade m kogu mass on siis mcross. + 4m põsed \u003d 1,018 kg.
Kardaanile antav võimsus L määratakse valemiga
![]() ,
,
kus Mmax on mootori maksimaalne pöördemoment, Mmax \u003d 259,5 Nm;
i1 - käigukasti esimese käigu ülekandearv, i1 \u003d 3,5;
- varda ja kahvli hõõrdetegur, \u003d 0,03;
dsh - risti piigi läbimõõt, dsh \u003d 0,016 m;
n on kardaani pöörlemiskiirus mootori maksimaalse võimsuse juures, mis on määratud järgmise valemiga:
 ;
;
R on kaugus pistiku pöörlemisteljest kuni jõu rakenduspunktini, R \u003d 0,036 m;
on šahtide vaheline kaldenurk, \u003d 3.
Seega on kardaanile antav võimsus võrdne
Kardaani kuumutamine määratakse valemiga
 .
.
Parameetri A väärtus on
 .
.
Pärast kõigi teadaolevate arvväärtuste asendamist universaalkütte kuumutamise valemiga saame järgmise sõltuvuse kardaani kuumenemise ja tööaja vahel:
 .
.
Kardaani osade kuumutamise sõltuvus selle tööajast on esitatud tabelis 2. Sõltuvuse graafik on joonisel 23.
Tabel 2.
Kardaani osade kuumutamise väärtused sõltuvalt selle tööajast.
|
Gimbal jooksuaeg |
||
Joonis: 23 Kardaani kuumutatud osade ja ümbritseva õhu temperatuuri erinevuse sõltuvus kardaani tööajast.
Graafikult on näha, et pärast hinge töö algust suureneb osade soojenemine järk-järgult ja mõne aja pärast on see seatud ligikaudu konstantseks ja võrdseks 45,8С-ga. See näitab soojuse tekkimise protsesside tasakaalustamist ja selle eemaldamist osade ja keskkonna materjalidesse. Kardaanühenduste nõellaagrid GAZ-2410 on määritud TAD-17i või TAP-15V reduktoriõlidega. Nende rakendamise temperatuurivahemiku ülemine piir on umbes 130 ... 135С. Kui arvestada ümbritseva õhu temperatuuriga 25С, on kardaani osade temperatuur pärast selle 4-tunnist töötamist umbes 70С. On näha, et see ei ületa määrde määramise vahemiku ülemist piiri. Seetõttu on tagatud normaalsed määrimistingimused ja kardaani normaalne töö.
Järeldus
Kursuseprojekti lõikes 2 viidi läbi auto GAZ-2410 kardaani ülekande kontrollarvutus. Selle arvutuse eesmärk oli katsetada kardaani käitusvõimet ülekantava pöördemomendi suurenemisega 1,5 korda võrreldes auto tehnilistes omadustes antud nominaalsega.
Arvutus näitas, et uutes töötingimustes:
sõukruvi võlli ristlõikes tekkivad nihkepöörded ei ületa lubatud väärtusi;
võlli pikkuse ühiku keerdumisnurk on vastuvõetavates piirides;
kardaanide risttappide purustus-, pügamis- ja painutuspinged ning kardaani venituspinged on lubatud;
nõelalaagrile mõjuv tegelik jõud ei ületa arvutatud suurimat võimalikku väärtust,
propellivõlli kriitilise pöörlemiskiiruse ja selle maksimaalse tööpöörlemiskiiruse suhe propellivõlli normaalseks tööks on täidetud;
kui kardaan töötab, tagatakse osade normaalne temperatuur.
Mitterahuldavaid tulemusi saadi ainult universaalkahvli arvutamisel - sektsiooni üksikute punktide maksimaalsed pinged ületasid lubatud piire. (vt punkt 2.6). Kahvli normaalse töö tagamiseks on vaja suurendada käppade ristlõikepinda. Suurendatud sektsiooni mõõtmed on toodud punktis 2.6.
Seega tagatakse GAZ-2410 kardaanülekande töövõime ülekantava pöördemomendi 1,5-kordse suurenemisega, ilma et jõuülekande konstruktsioon praktiliselt muutuks (välja arvatud kardaanühenduse käpaosa suurenemine). See viitab sellele, et auto kujundamisel kujundati kardaan (ja seega kogu käigukast) "varuga". Arvutamiseks lähteandmete valimisel eeldati, et moderniseerimata autole paigaldati mootor ZMZ-4021, mille pöördemoment on 173 Nm. Kuid nagu kasutusjuhendis märgitud, võib selle asemel paigaldada mootori ZMZ-402, mille pöördemoment on 182 Nm. Erinevate jõuallikate paigaldamisel ei tehta muudatusi sõiduki ülekandes. Selles töös tehtud arvutuse tulemuste põhjal on näha, et autol GAZ-2410 on ilma kardaani jõuülekande konstruktsioonis olulisi muudatusi võimalik paigaldada mootor, mille pöördemoment on umbes 260 Nm.
Kirjandus
Volga autod: Kasutusjuhend. - 7. väljaanne - Gorki: Autotehase trükikoda, 1990. - 176 lk. - (Gorki autotehase projekteerimise ja katsetöö osakond).
Anokhin V.I. Kodumaised autod. - M.: masinaehitus, 1968. - 832 lk.
Baškardin A.G., Kravtšenko P.A. Autod. Töövood ja arvutamise alused. - L.: LISI, 1981. - 58 lk.
Zvjagin A.A., Kravtšenko P.A. Autode disain. Kursus "Autod", 3. osa. 1. väljaanne: autoülekanne. - L.: LISI, 1975. - 88 lk.
Lühike autode teatmeteos. - 10. väljaanne, Ilm. ja lisage. - M.: Transport, 1985. - 220 lk, Ill., Tab. - (Autotranspordi riiklik teadusuuringute instituut).
Osepchugov V.V., Frumkin A.K. Automobile: struktuurianalüüs, arvutuselemendid: õpik ülikoolide üliõpilastele, kes on spetsialiseerunud autodele ja autotööstusele. - M.: Masinaehitus, 1989. - 304 lk, Ill.
GAAS - Lõputöö \u003e\u003e Transport
Võimsus edasikandumine, see sisaldab: sidur, kast käik, kardaan saade, Kodu saade, diferentsiaal ... toitel edasikandumine... Võimul edasikandumine auto GAAS-51A on paigaldatud ... ja tasakaalus arvutused keskmine tegelik ...
Heaks kiidetud ja rakendama
Tellimuse järgi Rostekhregulirovanie
VENEMAA FÖDERATSIOONI RIIKLIK STANDARD
AUTOSÕIDUKID
JUHTIMISE SÕIDUKID LIIGESEGA
VÕRRATU PÕHJUSKIIRUS
ÜLDISED TEHNILISED TINGIMUSED
Sõidukid. Liigenditega sõidukite kardaanmehhanismid
kohta ebavõrdsed nurkkiirused. Üldised tehnilised nõuded
GOST R 52430-2005
Grupp D25
OKS 43.040.50;
OKP 45 9128
Sissejuhatuse kuupäev
Eessõna
Standardimise eesmärgid ja põhimõtted 2007 Venemaa Föderatsioon kehtestatud 27. detsembri 2002. aasta föderaalseadusega N 184-FZ "Tehnilise normi kohta" ja Vene Föderatsiooni riiklike standardite rakenduseeskirjad - GOST R 1.0-2004 "Venemaa Föderatsiooni standardimine. Põhisätted".
Teave standardi kohta
1. Töötanud välja föderaalriigi ühtse ettevõtte "Tööuuringute autode punase lipu keskkord ja autotööstuse instituut"(FSUE" NAMI "), JSC" BELKARD ".
2. Tutvustas standardimiskomitee TC 56 "Maanteetransport".
3. Kinnitatud ja jõustunud föderaalse tehniliste normide ja metroloogia agentuuri 28. detsembri 2005. aasta määrusega N 407-st.
4. Esmakordselt tutvustatud.
1 kasutusala
Käesolevat standardit kohaldatakse ebavõrdse nurkkiirusega hingedega veovõllide, nende sõlmede ja M- ja N-kategooria mootorsõidukite (edaspidi ATC) ülekandeks mõeldud osade suhtes vastavalt standardile GOST R 52051. Standardit on lubatud rakendada teiste sõidukite, masinate ja seadmete veovõllidele. mehhanismid.
Selles standardis kasutatakse viiteid järgmistele standarditele:
GOST R 52051-2003. Mehaaniline sõidukid ja haagised. Klassifikatsioon ja mõisted
GOST 8.051–81. Riiklik süsteem mõõtmiste ühtsuse tagamiseks. Kuni 500 mm lineaarsete mõõtmete mõõtmisel on lubatud vead
GOST 9.014–78. Ühtne korrosiooni ja vananemise kaitse süsteem. Toodete ajutine korrosioonivastane kaitse. Üldnõuded
GOST 9.104–79. Ühtne korrosiooni ja vananemise kaitse süsteem. Värvi- ja lakikatted. Töötingimuste rühmad
GOST 15.309-98. Tootearenduse ja tootmisse toomise süsteem. Valmistatud toodete testimine ja vastuvõtmine. Põhisätted
GOST 15140–78. Värvid ja lakid. Haardumise määramise meetodid
GOST 15150–69. Masinad, seadmed ja muud tehnilised tooted. Versioonid erinevatele kliimapiirkondadele. Kategooriad, töötingimused, ladustamine ja transport seoses väliskeskkonna kliimategurite mõjuga.
Märge. Selle standardi kasutamisel on soovitatav kontrollida võrdlusstandardite kehtivust avalikus infosüsteemis - Venemaa Föderatsiooni riikliku standardimisasutuse ametlikul veebisaidil Internetis või vastavalt iga-aastaselt avaldatavale teabeindeksile "Riiklikud standardid", mis avaldatakse jooksva aasta 1. jaanuari seisuga ja jooksval aastal avaldatud vastavad igakuised infosildid. Kui viidatud dokument asendatakse (muudetakse), peaks selle standardi kasutamisel juhinduma asendatud (muudetud) dokumendist. Kui viidatud dokument tühistatakse ilma asendamiseta, kehtib säte, milles link sellele on antud, ulatuses, mis seda linki ei mõjuta.
3. Mõisted ja määratlused
Selles standardis kasutatakse järgmisi mõisteid koos vastavate definitsioonidega:
3.1. Kardaanmootor: ATS-seade, mis koosneb kahest või enamast kardaanvõllist, vahetoest (vajadusel) ja mis on ette nähtud pöördemomendi ülekandmiseks ühest seadmest teise, mille võlli teljed ei lange kokku ja võivad muuta nende suhtelist asendit.
3.2. Kardaanvõll: toru või varda kujul või toru ja varda kombinatsioonis valmistatud kardaan kardaani või poolkardaaniga, kaasa arvatud elastsed poolkardaanühendused, millel võib olla mehhanism võlli pikkuse muutmiseks.
3.3. Kardaanühendus: kinemaatiline pöördpaar, mis on mõeldud võlli ühendamiseks ristuvate telgedega ja annab võimaluse pöördemomenti edastada muutuva nurga all.
3.4. Topeltkardaanühendus: kinemaatiline üksus, mis koosneb kahest kardaanliigendist, millel on võrdsed nurkkiirused ja mis on ühendatud ühenduspindade või ühisosa abil.
3.5. Propelleri võlli pikkus: liigendäärikute ühenduspindade vaheline kaugus.
Märkused. 1. Võlli pikkuseks on lubatud võtta hingede või muude konstruktsioonielementide keskpunktide vaheline kaugus, näiteks kaugus hinge keskosast vahetoe laagri keskmesse.
2. Kui on olemas sõukruvi võlli pikkuse muutmise mehhanism, tuleks selle minimaalset pikkust pidada äärikute ühenduspindade vaheliseks kauguseks sõukruvi võlli täielikult kokkusurutud asendis ja maksimaalseks pikkuseks - sõukruvi võlli minimaalse pikkuse ja selle pikkuse muutmise mehhanismi maksimaalse lubatud käigu koguväärtus.
3.6. Propelleri võlli pikkuse muutmise mehhanism: seade, mis muudab propelleri võlli pikkust, kui propelleri võlli abil ühendatud üksuste vaheline kaugus muutub.
3.7. Kardaanvõlli pikkus: kardaani (kardaanivõllide) või muude konstruktsioonielementide ühenduspindade vaheline kaugus.
3.8. Veovõlli vahelaager: mehhanism, mida kasutatakse kahe veovõlli võlli ühendamise toetamiseks.
3.9. Kardaanülekande paigaldusnurgad: horisontaalsel pinnal paiknevad nurkad kogu massiga sõiduki kardaaniülekande liigendites.
3.10. Maksimaalne nurk pöördenurk: suurim võimalik pöördenurk pöördliikumise ajal.
3.11. Pöördmoment: hetk, mis on vajalik pöördetugevuse suhtelise nurkliikumise suhtes vastupanu ületamiseks.
3.12. Aksiaalse liikumise pingutus mehhanismis sõukruvi võlli pikkuse muutmiseks: mehhanismi elementide suhteliseks teljesuunaliseks liikumiseks vajalik jõud, mida pole koormatud sõukruvi võlli pöördemomendiga ja (või) paindemomentidega.
3.13. Propelleri võlli kahvlite pöördenurk: propelleri võlli kahvlite aukude telgede suhteline nurkne nihe.
4. Peamised parameetrid ja tehnilised nõuded
4.1. Kardaanmehhanismide peamised parameetrid on:
Minimaalne pikkus;
Maksimaalne pikkus;
Maksimaalne pöördenurk hinges;
Aksiaalse liikumise pingutus pikkuse muutmise mehhanismis;
Tasakaalutus;
Pöördemoment, mida saab säilitada püsiva deformatsioonita;
Pöördemoment peab vastu osi purustamata.
4.2. Propelleri võlli kriitilise kiiruse arvutamine on esitatud A liites.
4.3. Igale toele viidatud propelleri võlli lubatud tasakaalustamatus ei tohiks ületada selle massi korrutist, mis tuleneb nendest tugedest, ja tabelis 1 näidatud spetsiifilisest tasakaalustamatusest.
Tabel 1
Propelleri võlli konkreetse tasakaalustamatuse normid
┌───────────────────────────────────┬─────────────────────────────────────┐
ReferredMaksimumkiirus Spetsiifiline tasakaalustamatus, millele viidatakse │
│ kardaan ülekandes, │ kardaani toele, g x cm / kg, │
│-1│ mitte rohkem kui│
├───────────────────────────────────┼─────────────────────────────────────┤
│Kuni 500 sh 25│
│Sv.500 "1500" │15│
│"1500"2500"│10│
│"2500"4000"│6│
└───────────────────────────────────┴─────────────────────────────────────┘
Märkused. 1. Lühikeste võllide puhul, millel puudub toru või kuni 300 mm toruga, on lubatud tasakaalustamatus sätestatud arendaja projektdokumentatsioonis (CD).
2. Selle tugedele langeva sõukruvi võlli tasakaalustamatuse arvutamine on esitatud liites B. Arvestuse tulemuste põhjal (vajadusel) tuleks konstruktsiooni optimeerida, et vähendada hingede tühimikke, mehhanismi pikkuse muutmiseks või sõukruvi või võlli võlli massi vähendamiseks.
4.4. Kardaani või kardaani edastatav maksimaalne pöördemoment ei tohi ületada projekteerimisdokumendis määratletud väärtusi, mis vastavad:
Kardaani jõuülekande või kardaani jääkdeformatsioonide puudumine;
Kardaani ega kardaani kahjustusi pole.
4.5. Propelleri võlli toru radiaalse läbilaskevõime, radiaalsete ja aksiaalsete kliirensite hingedes, aksiaalse liikumise jõud pikkuse muutmise mehhanismis, pöörlemismomendi hinges on lubatud arendaja ettevõtte projektdokumentatsioonis.
4.6. Kokkupandud kardaanmootorid tuleks värvida vastavalt standardi GOST 9.104 nõuetele.
Lubatud värvimata laagrite puurid, äärikute õõnsused, ristid, kõrvade sisepinnad ja kahvlite pistikud.
Veovõlli äärikute ühendus- ja tsentreerimispinnad peaksid olema kaitstud värvimise eest vastavalt tootja projektdokumentatsiooni nõuetele.
4.7. Propelleri võlli värvkatte kile haardumine ei tohiks ületada 2 punkti vastavalt standardile GOST 15140.
4.8. Pealekantud värvid ja lakid peavad võimaldama ajamivõllide toonimist õhku kuivavate värvidega.
4.9. Ostetud piiratud säilivusajaga tooteid tuleks veovõllide kokkupanekuks kasutada aja jooksul, mis on nende toodete tarnimise dokumentides kindlaks määratud.
4.10. Installitud jõuülekande ressurss ei tohi olla vähem sobiv PBX-ressurss, millele see on mõeldud.
4.11. Kardaanvõllide ülekandeseadmete paigaldamise lubatud nurgad on esitatud lisas B.
4.12. Lubatud kõrvalekalded propellivõllide kahvli-ääriku, propellermootoriga ühendatud sõlmede äärikute ühenduspindade kujust on toodud D liites.
5. Vastuvõtureeglid
5.1. Toodete vastuvõtukontrolli (PC) teostab tootja tehnilise kontrolli teenus (STC).
5.2. Kardaanautodele ja nende elementidele tehakse pärast vastuvõtukontrolli vastuvõtukatsed (PSI) ja perioodilised testid (PI). Katsed viiakse läbi vastavalt standardile GOST 15.309 ja tootja tehnilisele dokumentatsioonile.
5.3. Kui tarnelepingud näevad ette nõustumise sõltumatu organi (kliendi või tarbija esindaja) poolt, siis võtab aktsepteerimise kindlaksmääratud esindus tootja STK juuresolekul.
5.4. Kardaani ülekannete perioodilised testid viiakse läbi vähemalt kolmel tootel, vähemalt kord kuue kuu jooksul. Positiivsed testitulemused põhimudelid kardaani ülekandeid on lubatud laiendada nende kujundusvõimalustele (modifikatsioonid, variandid).
Jõuülekande muudatuste perioodilised testid võib asendada baasmudeli katsetega.
5.5. Katsete käigus kontrollitud parameetrid (PSI, PI) on esitatud D liites.
5.6. Tarbijal on õigus teha pistelist kontrolli kardaaniülekannete, nende seadmete ja osade vastavuse kohta käesoleva standardi nõuetele ja arendaja projektdokumentatsioonile.
Kontroll viiakse läbi STK vastuvõtukontrolli raames.
6. Kontrollimeetodid (testimine)
6.1. Terviklikkus, korrektne kokkupanek, keevisõmbluste välimus, välimine seisund kaitsekate, torude ja nendega seotud osade pinnal olevate pragude, mõlkide ja muude mehaaniliste kahjustuste puudumist kontrollitakse visuaalselt tasakaalustusplaatide kinnitamist (vt lisa E).
6.2. Lineaar- ja nurgamõõtmeid mõõdetakse maksimaalsete lubatud vigadega, mis on kehtestatud standardiga GOST 8.051.
6.3. Kardaani liigendites pöördenurki, samuti kardaani kahvlite pöördenurka mõõdetakse nurkade abil, mille viga on +/- 1 °.
6.4. Propellervõlli toru radiaalset väljavoolu mõõdetakse siis, kui lähtutakse piki ühenduspindu veaga +/- 0,01 mm.
6.5. Radiaal- ja aksiaalsed kliirensid hinges või nende koguväärtus mõõdetakse vähemalt 0,01 mm täpsusega. Ristväärtusi on lubatud määrata ristmiku ja laagrite mõõtmete tulemuste põhjal, võttes arvesse võimalikke aksiaalseid nihkeid (piki ristlõike piike) "laagrihargi" liigendites.
6.6. Pikkuse muutmise mehhanismi telgliikumise jõud määratakse täpsusega 5% maksimaalsest väärtusest.
6.7. Pöördmoment määratakse täpsusega 2,5% maksimaalsest väärtusest.
6.8. Kardaanvõllide ja kardaaniliigeste tugevuse hindamiseks mõjutab neid projektdokumendis määratud pöördemoment, täpsusega 2,5% selle väärtusest.
6.9. Propelleri võlli tasakaalustamatus määratakse täpsusega 10% lubatud väärtusest, tasakaalustamatusega vähem kui 20 g x cm - täpsusega 2 g x cm.
6.10. Veovõllid peavad olema dünaamiliselt tasakaalus. Dünaamilise tasakaalustusrežiimi määrab projekti dokumentatsioonis kardaani ülekande ettevõtte arendaja, tingimusel et tagatakse tabelis 1 toodud tasakaalustamatuse normid.
6.11. Kardaanmehhanismid peavad olema tasakaalustatud koos kõigi võllide ja vahelaagritega.
Rohkem kui kolme kardaanvõlli kardaanvõlli eraldi tasakaalustamise võimalus on sätestatud tootja projektdokumentatsioonis.
6.12. Kardaanvõllide tasakaalustamine pikkuse muutmise mehhanismiga peaks toimuma arendaja projektdokumentatsioonis määratletud pikkusega.
6.13. Kardaanmehhanismide kahvliäärikud, mis kaaluvad üle 5 kg, tuleks enne kardaani kokkupanekut täiendavalt tasakaalustada vastavalt arendaja projektdokumentatsioonile.
6.14. Tasakaalustusmasinale uuesti paigaldamisel ei tohi propelleri võlli tasakaalustamatus ületada lubatud väärtust.
6.15. Tasakaalustamatuse kontroll viiakse läbi pärast skaalajaotuse väärtuse kontrollimist. mõõtevahend vastavalt punktile 6.9 ja tasakaalustusmasina õigele seadistusele.
6.16. Kardaanülekande värvkatte kile haardumine tuleks määrata võre sälgude meetodil vastavalt standardile GOST 15140.
6.17. Ristide piikide pinnakihi kõvadust kontrollitakse vastavalt tootja metoodikale.
7. Märgistamine
7.1. Kardaanajamid on nende identifitseerimise tagamiseks tähistatud. Märgistuse sisu, toote pealekandmise viis ja koht on vastavalt arendajaettevõtte projektdokumentatsioonis sätestatud.
8. Pakendamine
8.1. Kardaanmootorite, sõlmede ja osade pakkimine peab tagama nende ohutuse alates mehaanilised kahjustused, sademete ja reostuse mõju. Pakendi tüüp ja selle puudumise võimalus on näidatud saatedokumentides.
9. Transport ja ladustamine
9.1. Kardaanmootoreid, seadmeid ja osi transporditakse mis tahes liiki transpordivahenditega, mis tagavad nende ohutuse mehaaniliste kahjustuste, reostuse ja sademete eest. Transporditingimuste rühm 6 (ОЖ2), ladustamine - 3 (Ж3) vastavalt standardile GOST 15150.
Tootja ja tarbija kokkuleppel on lubatud rakendada muid transpordi- ja ladustamistingimusi vastavalt standardile GOST 15150.
9.2. Kõik kardaanmootorite värvimata välimised metallpinnad, nende sõlmed ja monteerimiseks mõeldud osad või varuosad tuleks tarnedokumentides määratud aja jooksul säilitada vastavalt standardile GOST 9.014.
10. Kasutusjuhend
10.1. Kardaanülekannete käitamine ja hooldus peaks toimuma vastavalt selle sõiduki kasutusjuhendile, millele need on paigaldatud.
11. Tootja garantiid
11.1. Tootja tagab kardaaniülekannete vastavuse käesoleva standardi nõuetele, arvestades ettevõtte kehtestatud käitamis-, transpordi- ja ladustamisreegleid.
11.2. Garantii periood kogu komplekti tarnitud kardaanide ajam ja garantii tööaeg ei tohiks olla vähem garanteeritud automaatse telefonijaama tähtaeg ja garantiiaeg, milleks need on ette nähtud.
11.3. Komplektis tarnitud kardaanide garantiiaeg ja garantiiaeg arvutatakse vastavalt sõidukile ja varuosadena tarnitavatele garantiikohustustele - sõidukile paigaldamise hetkest.
Komplektiga kaasas olevad kardaanvõrgud peaksid olema PBX-ile paigaldatud toote tehnilises dokumentatsioonis määratud aja jooksul.
11.4. Kardaanmäluseadmete garanteeritud säilitamisaeg ei ületa 12 kuud.
Kardaanmootorite garanteeritud säilivusaega arvutatakse alates toote saatmise kuupäevast.
rakendus JA
(viide)
Propelleri võlli kriitilise kiiruse arvutamine
Terastoruga kardaani puhul arvutatakse kriitiline kiirus ,, valemiga
, (1)
kus D on toru välisläbimõõt, cm;
d - toru siseläbimõõt, cm;
L on veovõllide liigendite telgede maksimaalne kaugus, cm;
kus on propellervõlli pöörlemissagedus ülekandes (võlli põikvibratsiooni loomulik sagedus esimesel kujul), mis vastab maksimaalne kiirus ATC ,.
Märkused. 1. Selles arvutuses ei võeta arvesse tugede elastsust.
2. Vahetoega kardaanmehhanismide korral võetakse L väärtus võrdseks kaugusega pöördteljest kesktugilaagri teljega.
Kardaanühenduste vahel varda kujul oleva võlli pöörlemise kriitiline sagedus arvutatakse d-ga, mis on võrdne nulliga.
Torust ja vardast koosneva sõukruvi võlli pöörlemise kriitiline sagedus arvutatakse vastavalt valemile toru pikkuse vähendatud väärtuse cm põhjal
, (2)
kus on võlli toru pikkus, cm;
Võlli varda asendava toru pikkus, vt.
Võlli varda asendava toru pikkus arvutatakse valemiga
 , (3)
, (3)
kus on võlli varda pikkus, cm;
Võlli varda läbimõõt, cm.
Sõiduki arendaja kehtestab eksperimentaalselt sõukruvi võlli pöörlemise kriitilise sageduse, võttes arvesse selle laagrite elastsust ülekandes.
Võlli pöörlemissagedus jõuülekandes, mis vastab sõiduki suurimale võimalikule kiirusele, ei tohiks olla suurem kui 80% kriitilisest sagedusest, võttes arvesse tugede elastsust.
rakendus B
(viide)
Propelleri võlli tasakaalustamatuse arvutamine
1. Propelleri võlli tasakaalustamatus sõltub selle massist ja tühikutest liigestes ning pikkuse muutmise mehhanismist.
2. Kardaani ülekandetoe ristlõikes tasakaalustamatus D, g x cm arvutatakse valemitega:
Pikkust muutva mehhanismita võlli jaoks; (1)
Pikkuse muutmise mehhanismiga võlli jaoks (2)
kus m on sõukruvi võlli mass ühe toe kohta, g;
Võlli telje kogu nihe, mis on põhjustatud ristiku otste ja laagripõhjade vahelise hinge aksiaalsetest vahedest ja radiaalsest kaugusest ühenduses "ristlõige - ristlaager", cm;
Võlli telje nihkumine pikkuse muutmise mehhanismi tühimike tõttu, vt.
Mass m määratakse kaaludes horisontaalselt asetseva võlli iga toe alla asetatud kaalule.
Võlli telje kogu nihe cm arvutatakse valemiga
![]() , (3)
, (3)
kus H on ristiku otste ja laagrite põhja vahelise hinge teljesuunaline vahe, cm;
Nõelte laagri siseläbimõõt, cm;
Risti tihvti läbimõõt, cm.
Võlli telje nihe cm määratakse kindlaks, võttes arvesse pikkuse muutmise mehhanismi konstruktsiooni. Näiteks välise või sisemise läbimõõduga tsentreeritava liikuva splainiühenduse jaoks määratakse see valemiga
, (4)
kus on hülsi ava läbimõõt, cm;
Seljavõlli läbimõõt, cm.
Märge. Kardaanvõlli jaoks ilma pikkuse muutmise mehhanismita \u003d 0.
Minimaalne ja maksimaalne tasakaalustamatus D arvutatakse, võttes arvesse kardaani jõuülekande või kardaani paarituselementide tolerantsivälja.
Propelleri võlli tegelik tasakaalustamatus, mis on määratud tasakaalustusseadme istumis- ja ühenduspindade, samuti jõuülekandeseadmete istumispindade valmistamise täpsusega, on suurem kui arvutatud väärtus.
rakendus AT
LUBATAVAD PROPELLERIVÕRGU PAIGALDUSNURGAD
Sõiduki täismassiga staatilises olekus oleva jõuülekande võlli paigaldusnurgad ei tohi olla suuremad kui:
3 ° - sõiduautodele;
5 ° - veoautode ja busside jaoks;
8 ° - nelikveolistele sõidukitele.
Nõellaagrite liigenditega kardaanvõlli paigaldamise minimaalsed nurgad peavad olema vähemalt 0,5 °.
Vankritelgede vahele paigaldatud kardaanvõllide puhul on lubatud paigaldusnurk null.
D liide
LUBATAVAD KUJU POOLED
LENDI ÜHENDAVAD PINNAD
Tabel D.1
Kuju tolerantsid ühendamine
ääriku pinnad
┌─────────────────────────┬──────────────┬─────────────┬──────────────────┐
│Maksimaalne sagedus│Tolerants│Tolerants Radiaalne tolerants│
│ sõukruvi võlli tasasuse pööramine, otsa maandumine
│-1│ mm, mitte rohkem kui │ löömine, mm, │ vöö, mm, │
Transmission ülekandes, min ││ enam pole enam
├─────────────────────────┼──────────────┼─────────────┼──────────────────┤
│ Kuni 500 k.a. │0.08│0.08│0.08│
.5Sv.500 "3500" │0,05 │0,05│0,05│
│"3500 "5000"│0,04│0,04│0,04│
│"5000│0,03│0,03│0,03│
└─────────────────────────┴──────────────┴─────────────┴──────────────────┘
Tabel D.2
Ühenduspindade kuju lubatud kõrvalekalded
äärikutega otsahambad
|
Tasasuse tolerants, mm, |
Lõppvoolutolerants, mm, |
|
0,12 |
Märge. Lubatud kõrvalekallete kontrollimine toimub 3,5 mm läbimõõduga rullidel.
rakendus D
(nõutud)
PARAMEETRID KONTROLLITUD KATSETE AJAL
Tabel E.1
|
Parameetri nimi |
Aktsepteerimine |
Vastuvõtt- |
Perioodiline |
|
Kardaan või kardaan |
|||
|
Täielikkus |
|||
|
Montaaži korrektsus |
|||
|
Välimus keevisõmblused |
|||
|
Kaitsekatte välimine olek |
|||
|
Torude puudumine ja |
|||
|
Tasakaalustusplaatide kinnitamine |
|||
|
Pöördemoment keermestatud ühendused |
|||
|
Nurgad kardaanliigendites |
|||
|
Pöördemoment |
|||
|
Rasva olemasolu igas piigis, sisse |
|||
|
Aksiaalnihke jõud mehhanismis |
|||
|
Jääk tasakaalustamatuse väärtus |
|||
|
Minimaalne pikkus |
|||
|
Maksimaalne pikkus |
|||
|
Kahvlite pöördenurk |
|||
|
Radiaalne toru väljavool |
|||
|
Radiaalsed ja aksiaalsed kliirensid liigeses |
|||
|
Väänetugevus |
|||
|
Nõellaagritega ristmik |
|||
|
Väänetugevus |
|||



