Ministarstvo obrazovanja i nauke Ruske Federacije
FSBEI HPE "Volgogradski državni tehnički univerzitet"
Fakultet za automobilski saobraćaj
Odsjek "Automobilski transport"
Semestarski rad
u disciplini "Certifikacija vozila"
Na temu: "Osiguravanje sigurnog nivoa upravljanja"
Završeno: Art. gr. AT - 500
Dzhavadov A.A.
Provjerio: Shustov A.V.
Volgograd 2013
Uvod ……………………………………………………………………… ... ………… 3
1. Svrha upravljanja ………………………………………… ..5
2. Dizajn upravljanja ………………………………………… 7
3. Glavne vrste upravljačkih mehanizama i pogona …………………………… 9
3.1 Upravljački uređaj ……………………………………………………… ..9
3.2 Upravljački uređaj …………………………………………………………… 10
4. Izgledi i nedostaci razvoja upravljanja ……………… ..12
4.1 Servo upravljač (GUR) ………………………… ... 12
4.2 Električno pojačalo ………………………………………………………… .. …… 14
4.3 Prednosti i nedostaci ……………………………………… .. …… 15
5. Upravljački uređaj otporan na sudare ……………………………………… .17
6. Tehnički zahtjevi za upravljanje u skladu sa GOST R 41.12-2001..18
Zaključak ………………………………………………………………………………… .22
Spisak korištenih izvora …………………………………………… 23
Uvod
Potreba ljudi za potrebom da se ubrza kretanje na zemlji dovela je čovječanstvo do stvaranja različiti automobili i mehanizme, od kojih je najprikladniji i najomiljeniji bio automobil.
Reč "automobil" znači "samohodna kočija", iako se u modernom smislu automobilima nazivaju samo vozila opremljena autonomnim motorima (sa unutrašnjim sagorevanjem, električnim, parnim).
Upravljački mehanizam automobila prošao je kroz zanimljivu istoriju razvoja. Sada nećete nikoga iznenaditi njegovom lokacijom - za saobraćaj na desnoj strani - na lijevoj strani, za lijevo - na desnoj strani. Ali ovaj raspored volana nije odmah određen. Stroga podjela kolovoza na lijevu i desnu stranu saobraćaja nastala je tek u XX vijeku, a na ulicama sa ne previše gustim saobraćajem nastavili su da se voze po potrebi. Sve do 60-ih godina XX veka nije se preferiralo kretanje određenom stranom ulice. Engleska, njene bivše kolonije, Japan se i dalje drže ljevice, Švedska je obnovljena s lijeva na desno tek 1967., Austrija, Mađarska i Čehoslovačka 30-ih godina. U Milanu su vozili lijevo, a u ostatku Italije desno. Uz toliku raznolikost pravila, ne bi moglo postojati jedinstveno gledište o lokaciji volana. Kada se umjesto poluge pojavila stub volana, koji je trebalo da se nalazi direktno ispred vozača, dizajneri su pokazali jednoglasnost - da se volan ugradi samo sa desne strane. Zbog toga je volan, u skoro svim prvim automobilima, bio na desnoj strani. Metode kontrole prvih automobila dvadesetog veka su od posebnog interesa. Workplace vozač je sadržavao tako veliki broj svih vrsta dugmadi i upravljačkih poluga da nije bilo iznenađujuće zabuniti se u njima. Postojale su samo tri ručice kočnice - na osovini mjenjača, na zadnjim točkovima i na takozvanom "mountain stop" - šiljatom štapu koji se spuštao na cestu pri kretanju uzbrdo, jer automobil nije držao kočnice na nagib (prototip moderne "parkirne kočnice"). Da li je moguće doći do poluge, da li je zgodno koristiti ih - dizajnera je malo zanimalo. Poluga je postavljena tamo gdje je to dizajn zahtijevao. Tako je vozač bio osuđen na akrobatske pokrete. Ali ovo nije dugo trajalo. Bilo je više automobila, bilo je izbora, a nisu svi vozači pristajali na takve "akrobacije". Bilo bi logično koncentrirati poluge i ručke na jednom mjestu, bliže rukama vozača. Stup upravljača je odabran kao takvo mjesto. Kada je bio nagnut (prvi put u automobilu Latil 1898.), upravljanje prijenosom sa stupa više nije bilo moguće. Istovremeno je utvrđeno da gomilanje poluga i ručki u blizini volana stvara zabunu. Neki od njih su zamijenjeni pedalama.
Početkom dvadesetog veka, vožnja automobila zahtevala je da vozač bude u dobroj fizičkoj formi. Prirodno rješenje je bilo povećanje omjera prijenosa upravljača, ali to nije dalo rješenje za problem. Godine 1925. Amerikanac Francis Davis patentirao je poseban uređaj nazvan "hidraulični servo upravljač". Istina, dizajn nije postigao trenutni uspjeh. Međutim, princip i put poboljšanja su zacrtani: od kasnih 30-ih - ranih 40-ih u Americi, a potom i u Evropi, dizajneri počinju da ugrađuju servo upravljač na neke od svojih modela automobila. Danas je ovaj uređaj opremljen svime transport tereta i veliki deo automobila.
1. Svrha upravljanja
Promjena smjera kretanja vozila vrši se okretanjem oko njegove uzdužne ose upravljanih kotača, koji su u pravilu prednji kotači.
Zbog rotacije upravljanih točkova, vektor brzine svakog od njih, paralelan uzdužnoj osi vozila, prestaje da se podudara sa ravninom rotacije točkova. Kao rezultat toga, u kontaktu kotača s cestom nastaju bočne sile koje su okomite na ravninu rotacije kotača. Ove bočne sile dovode do toga da volani i vozilo u cjelini odstupe od ravne i skrene.
Kontrola upravljača obezbeđuje neophodan pravac vozila putem odvojene i koordinisane rotacije njegovih upravljanih točkova. Skup mehanizama koji služe za okretanje upravljanih kotača naziva se upravljanje.
Upravljanje se koristi za promjenu smjera vozila. Kada prednja osovina miruje, smer kretanja vozila se menja okretanjem prednjih upravljanih točkova.
Upravljač se sastoji od upravljača koji je osovinom povezan sa upravljačkim mehanizmom i upravljačkog mehanizma. Ponekad je pojačalo uključeno u upravljanje.
Upravljački zupčanik se naziva zupčanik za usporavanje, koji pretvara rotaciju osovine volana u rotaciju osovine dvonošca. Ovaj mehanizam povećava napor vozača do upravljača i olakšava rad.
Upravljačkim mehanizmom se naziva sistem šipki i poluga, koji u sprezi sa kormilarskim mehanizmom okreće automobil.
Da bi automobil napravio zaokret u vožnji bez bočnog proklizavanja točkova, svi se moraju kotrljati duž lukova različitih dužina opisanih od centra rotacije “O” (slika 1). U tom slučaju, prednji upravljani točkovi bi se trebali okretati različitim uglovima... Unutrašnji točak u odnosu na centar rotacije treba da se okreće kroz ugao alfa-B, spoljni točak - kroz manji ugao alfa-H. To je osigurano trapezoidnim spojem šipki i upravljačkih poluga. Osnova trapeza je greda prednja osovina automobila, stranice su lijeva i desna zakretna kraka, a vrh trapeza formira poprečna šipka, koja je okretno povezana sa krakovima. Osovine točkova su čvrsto pričvršćene za poluge.
Slika 1- Šema okretanja automobila
gde je: 1 - greda prednje osovine automobila 2 i 4 - okretne poluge; 3-poprečna karika; 5-zakretni zglob kotača; 6-uzdužna karika.
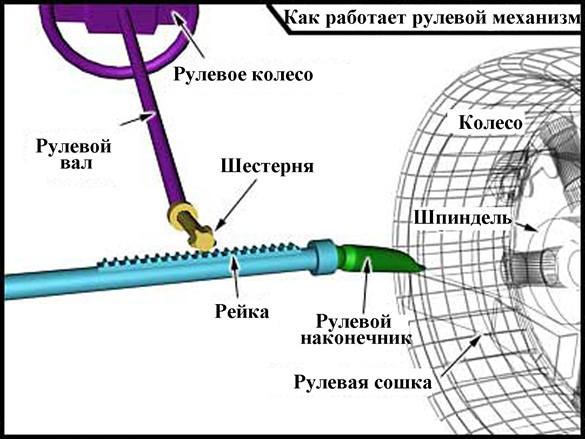
2. Upravljačka struktura
Položaj i interakcija dijelova upravljača koji nemaju pojačalo može se vidjeti na dijagramu (slika 2.a). Ovdje se upravljački mehanizam sastoji od upravljača, osovine upravljača i kormilarskog prijenosnika formiranog zahvatanjem pužnog zupčanika (puža) sa zupčastim graničnikom, na čijoj je osovini pričvršćen pogonski dvonožac. Dvonožac i svi ostali dijelovi upravljača: uzdužna karika, gornji krak lijevog stožera, donji krak lijevog i desnog stožera, poprečna karika čine upravljački mehanizam.
Okretanje upravljanih kotača nastaje kada se volan okreće, što prenosi rotaciju na upravljački zupčanik kroz osovinu. U tom slučaju, prijenosni puž, koji je u zahvatu sa sektorom, počinje pomicati sektor gore ili dolje duž svog žljeba. Sektorska osovina počinje da se okreće i skreće dvonožac koji se svojim gornjim krajem gura na istureni deo osovine sektora. Otklon bipoda prenosi se na uzdužni potisak, koji se kreće duž svoje ose. Uzdužna karika je preko nadlaktice povezana sa osovinom, tako da njeno kretanje uzrokuje rotaciju lijevog stožera. Od njega se sila upravljanja prenosi na desnu osovinu kroz donje poluge i poprečnu šipku. Tako se oba točka okreću.
Upravljački kotači se okreću upravljačem pod ograničenim kutom od 28-35°. Ograničenje se uvodi kako bi se spriječilo da točkovi pri skretanju dodiruju dijelove ovjesa ili karoseriju automobila.
Dizajn upravljača u velikoj mjeri ovisi o vrsti ovjesa volana. At zavisna suspenzija prednji točkovi, u principu, šema upravljanja prikazana na (sl. 2. (a)) je sačuvana, sa nezavisna suspenzija(sl. 2. (b)) kormilarski mehanizam je nešto složeniji.

Slika 2 - Dijagrami upravljanja:
a) sa zavisnim ovjesom prednjih kotača
gdje: 1-upravljački mehanizam; 2-upravljačka osovina; 3-volan; 4- zakretni klinovi; 5- i 7-okretne poluge; 6-poprečni potisak; 8-uzdužni potisak; 9 - bradavica;
b) sa nezavisnim ovjesom
gdje: 1-pržiti; 2-zakretne poluge; 3 i 6 - bočne šipke; 4-glavna poprečna karika; 5-kraka klatna.
Ovaj tip kormilarskog mehanizma se ugrađuje na odvojeno putnički automobili mobilnih telefona izvršna klasa kao i teška kamioni mobilnih i autobusa.
Zavojni upravljački mehanizam automobila uključuje sljedeće glavne elemente: vijak montiran na osovinu volana; matica koja se kreće duž vijka; zupčasta letva izrezana u maticu; nazubljeni sektor spojen na letvu; bipod za upravljanje, koji se nalazi na osovini sektora, odnosno dva radna para su uključena u rad mehanizma - navrtka i sektor sa zupcima.
Vijak i matica koji se koriste u spiralnom upravljačkom mehanizmu razlikuju se od uobičajenog para vijaka po tome što su posebno napravljene šupljine između bočnih površina para ispunjene kuglicama.
Putanja za kuglice su spiralni žljebovi napravljeni na tijelu vijka i u matici. Kada se zavrti zavrtanj, kuglice kruže u matici u zatvorenom krugu, kotrljajući se iz kanala za vijke kroz rupu na jednoj strani matice i vraćajući se u maticu kroz premosni kanal na suprotnoj strani.
Upotreba cirkulirajućih kuglica omogućava zamjenu trenja klizanja u paru vijak-matica trenjem kotrljanja, čime se povećava efikasnost prijenosa, kao kod smjer naprijed i obrnuto. Ovo poboljšava uslove za stabilizaciju volana, ali i čini mehanizam prilično osetljivim na udarce sa puta. Stoga treba ugraditi amortizere ili servo upravljač kako bi se izgladili udari.
Dubina spiralnog žlijeba je promjenjiva, a debljina srednjeg zupca sektora je povećana u odnosu na ostale zube kako bi se spriječilo zaglavljivanje upravljačkog mehanizma u ekstremnim položajima.
U principu, rad spiralnog upravljačkog mehanizma malo se razlikuje od rada pužnog zupčanika. Okretanje volana je praćeno rotacijom vijka, koji pomiče maticu koja se spaja s njim. U ovom slučaju, kuglice kruže, značajno smanjujući trenje između spiralnih površina.
Matica pomoću zupčaste letve pomiče nazubljeni sektor, a sa njim i ručicu upravljača.
Zazor u zahvatu klipnog nosača sa sektorom osovine dvonošca podešava se aksijalnim pomicanjem osovine dvonošca pomoću posebnog zavrtnja za podešavanje.
Zazor u paru vijak-matica nije podesiv, stoga su visoka pouzdanost i potreban vijek trajanja u ovom zahvatu osigurani korištenjem visokokvalitetnih legiranih čelika.
Zavojni upravljački zupčanik naspram pužni zupčanik ima veću efikasnost i sposoban je da prenese velike sile.
Jedan od nedostataka ovog dizajna je teškoća ugradnje dijelova vijčanog prijenosa kada se u dizajnu koriste kružne kuglice.
Upravljački mehanizam automobila ZIL-431410
Uređaj spiralnog upravljačkog mehanizma automobila ZIL-431410 prikazan je na Sl. 3.

Menjač je povezan sa osovinom volana pomoću kardansko vratilo sa dvije šarke. Carter 3
mjenjač je izliven od livenog gvožđa i ima niži 1
, srednji 9
, gornji 14
i bočno 19
poklopac.
Stalak klipa se nalazi u kućištu radilice 4
u kojoj je kuglična matica fiksno montirana 6
... Kuglasta matica se sastavlja vijkom na način da se formiraju spiralni žljebovi u koje se ubacuju kuglice 8
.
Dva utisnuta žljeba umetnuta su u žljeb kuglične matice, spojena sa dvije rupe sa svojim spiralnim žljebom 7
formirajući cijev duž koje se kuglice kotrljaju kada se zavrti vijak 5
sa jednog kraja matice, vratite se na drugi kraj.
Klip-rack 4
spaja se sa nazubljenim sektorom 18
osovina 21
dvonožac, koji se okreće na bronzanim čahurama utisnutim u kućište radilice. Aksijalno pomicanje osovine dvonožaca vrši se rotacijom zavrtnja za podešavanje 20
, čija glava ulazi u otvor osovine dvonošca.
Prilikom umotavanja vijak za podešavanje praznina u zahvatanju zupčastog sektora je smanjena, rezultirajuće povećanje otpora okretanju ne bi trebalo da prelazi 500 N... Dvonožac je instaliran na vanjskom kraju osovine s prorezom 23
.
Kada se volan okreće, sila vozača se prenosi kroz osovinu volana i kardanski prenos na vijak 5
... Ball nut 6
pomiče se duž ose vijka, nosi duž klipne letve 4
koji rotira nazubljeni sektor 18
sa osovinom 21
dvonožac oko svoje ose.
Sila bipoda 23
prenosi se na upravljački mehanizam, koji okreće volan.
Upravljački mehanizmi vozila KamAZ, KrAZ, MAZ i BelAZ rade po sličnoj šemi.
U prethodnom članku pod naslovom "" shvatili smo čemu služi upravljački mehanizam u automobilu i zašto mu se nameću takvi zahtjevi. Sada pogledajmo vrste kontrola upravljanja koje se aktivno instaliraju na modernim automobilima.
Dugo vremena dizajneri automobila nisu ni razmišljali o servo upravljaču. Niski zahtjevi za rukovanje i udobnost i relativno mali kontakt uske gume omogućio je da se izostavi jedna ljudska snaga čak i u upravljanju teškim kamionima. Postojao je samo jedan način da se smanji napor na volanu: da se poveća omjer prijenosa pogona i prečnik volana. Moralo se pomiriti i činjenica da će vozač morati da odigra pet-šest obrtaja od odskoka do odskoka sa ogromnim volanom, a da će preciznost upravljanja biti niska.
Prvo, servo se pojavio na teškoj opremi - rudarski kiperi... Desilo se to krajem 30-ih godina, prije rata. Istina, u početku su počeli koristiti pneumatske pojačivače - bili su jednostavni i pokretani su kompresorom ili usisna grana... Ali hidraulika, iako složenija i skuplja od pneumatike, radila je tiše i preciznije. Dizajneri putničkih automobila su se odlučili na to. Godine 1951, Chrysler Crown Imperial proizvodna vozila su prvi put opremljena hidrauličnim pojačivačima Hydraguide kao standardna oprema... A u Evropi je 1954. godine Citroen DS 19 dobio hidraulični pojačivač.
Upravljački mehanizam.
Upravljački mehanizam služi za povećanje i prijenos sile koju vozač primjenjuje na volan na upravljački mehanizam. U putničkim automobilima uglavnom se koriste pužni i zupčasti upravljački mehanizmi. Prednosti mehanizma "puž-valjak" uključuju: nisku sklonost prenošenju udaraca od neravnina na cesti, velike kutove rotacije kotača, mogućnost prijenosa velikih sila. Nedostaci su veliki broj šipki i zglobnih zglobova sa stalno nagomilanim zazorom, "težak" i neinformativan volan. Na kraju se pokazalo da su minusi značajniji od plusa. Na modernih automobila takvi uređaji se praktički ne koriste.
Najčešći danas je kormilarski mehanizam sa zupčanikom. Mala težina, kompaktnost, niska cijena, minimalan broj šipki i spojeva - sve je to dovelo do široke upotrebe. Mehanizam zupčanika i zupčanika idealan je za konfiguracije pogona na prednje točkove i pruža veću lakoću i preciznost upravljanja. Međutim, postoje i nedostaci: zbog jednostavnosti dizajna, svaki pritisak s kotača prenosi se na volan. A takav mehanizam nije u potpunosti prikladan za teške mašine.
Upravljački pogon.
Upravljački mehanizam je dizajniran za prijenos snage s upravljačkog mehanizma na upravljane kotače, istovremeno osiguravajući njihovu rotaciju pod nejednakim uglovima. Ako se oba točka okreću na isti način, unutrašnji točak će se ukrštati na putu (klizati bočno), što će smanjiti efikasnost upravljanja. Ovo proklizavanje, koje takođe stvara dodatnu toplotu i habanje točka, može se eliminisati okretanjem unutrašnjeg točka pod većim uglom od spoljašnjeg točka. Prilikom skretanja svaki od kotača opisuje svoj krug, koji se razlikuje od drugog, a vanjski (najudaljeniji od središta zavoja) točak se kreće duž većeg polumjera od unutrašnjeg. A budući da imaju zajednički centar rotacije, unutrašnji kotač mora biti okrenut pod većim uglom od vanjskog. To je osigurano dizajnom takozvane "upravljačke poluge", koja uključuje zakretne ruke i šipke upravljača sa šarkama. Potreban omjer uglova rotacije kotača osigurava se izborom ugla nagiba ručica upravljača u odnosu na uzdužnu osu vozila i dužine upravljačkih poluga i poprečne karike.
 |
- Upravljački mehanizam pužnog tipa sastoji se od:
- volan sa osovinom,
- karter pužnog zupčanika,
- parovi "puž-valjak",
- ruka upravljača.
Par puž-valjak je u stalnom zahvatu u kućištu upravljačkog mehanizma. Puž nije ništa drugo do donji kraj osovine upravljača, a valjak se, zauzvrat, nalazi na osovini upravljača. Kada se volan okreće, valjak se počinje kretati duž spiralne niti puža, što dovodi do rotacije osovine ruke upravljača. Pužni par, kao i svaka druga veza zupčanika, zahtijeva podmazivanje, pa se ulje ulijeva u kućište upravljačkog mehanizma, čija je marka navedena u uputama za automobil. Rezultat interakcije para "puž-valjak" je transformacija rotacije volana u rotaciju ruke upravljača u jednom ili drugom smjeru. A onda se napor prenosi na upravljački mehanizam i sa njega na upravljane (prednje) točkove. U modernim automobilima koristi se bezbedna osovina upravljača, koja se može sklopiti ili slomiti kada vozač udari volan tokom nesreće kako biste izbjegli ozbiljne ozljede grudnog koša.
 |
Kormilarski mehanizam koji se koristi sa pužnim mehanizmom uključuje:
- desni i levi bočni štapovi,
- srednji potisak,
- krak klatna,
- desna i lijeva okretna poluga kotača.
Svaki Tie Rod na svojim krajevima ima šarke tako da se pokretni dijelovi upravljačkog pogona mogu slobodno rotirati jedan u odnosu na drugi i tijelo u različitim ravnima.
- Mehanizam kormilarskog nosača.
Ovaj kormilarski mehanizam Sila se prenosi na točkove pomoću cilindričnog ili spiralnog zupčanika ugrađenog u ležajeve i zupčaste letve koja se kreće u čahurama za vođenje. Da bi se osiguralo uključivanje bez zazora, letva je pritisnuta oprugama na zupčanik. Upravljački mehanizam je osovinom povezan sa volanom, a letva je povezana sa dve poprečne šipke, koje se mogu pričvrstiti na sredini ili na krajevima letve. Ovi mehanizmi imaju malo odnos, što omogućava brzo okretanje upravljanih kotača u željeni položaj. Potpuni okret upravljanih kotača iz jednog ekstremnog položaja u drugi izvodi se za 1,75 ... 2,5 okretaja upravljača.
Jedan od glavnih sistema koji osiguravaju sigurnost kretanja automobilom je upravljanje... Svrha upravljanja automobilom je mogućnost promjene smjera vožnje, skretanja i manevriranja prilikom izbjegavanja prepreka ili preticanja. Ova komponenta je podjednako važna kao kočioni sistem... Dokaz za to je propisivanje saobraćajnih pravila, strogo je zabranjeno upravljanje automobilom sa neispravnim navedenim mehanizmima.
Karakteristike jedinice i dizajna
Na automobilima se koristi kinematička metoda promjene smjera kretanja, što podrazumijeva da do realizacije skretanja dolazi zbog promjene položaja upravljanih kotača. Obično se upravlja prednjom osovinom, iako postoje automobili sa tzv. upravljačkim sistemom. Posebnost rada u takvim automobilima je to što su točkovi stražnja osovina također rotirati prilikom promjene smjera, ali pod manjim uglom. Ali do sada ovaj sistem nije postao široko rasprostranjen.
Osim kinematičke metode, snaga se koristi i u tehnologiji. Njegova posebnost je u tome što se za okretanje kotači s jedne strane usporavaju, dok se s druge strane kreću istom brzinom. I iako ova metoda promjene smjera na putničkim automobilima nije dobila distribuciju, ona se i dalje koristi na njima, ali u nešto drugačijem kapacitetu - kao sistem stabilnosti smjera.
Ovaj sklop vozila sastoji se od tri glavna elementa:
- stub upravljača;
- kormilarski mehanizam;
- pogon (sistem šipki i poluga);
Upravljački čvor
Svaka komponenta ima svoj zadatak.
Stup upravljača
Prenosi rotirajuću silu koju vozač generiše za promjenu smjera. Sastoji se od upravljača koji se nalazi u kabini (vozač djeluje na njega tako što ga okreće). Čvrsto je montiran na osovinu stupa. U uređaju ovog dijela upravljača vrlo se često koristi osovina, podijeljena na nekoliko dijelova, međusobno povezanih kardanskim zglobovima.
Ovaj dizajn je napravljen s razlogom. Prvo, omogućava vam da promijenite ugao upravljača u odnosu na mehanizam, da ga pomaknete u određenom smjeru, što je često potrebno pri sastavljanju sastavni dijelovi auto. Osim toga, ovaj dizajn omogućava povećanje udobnosti kabine - vozač može promijeniti položaj volana u dosegu i nagibu, pružajući najudobniji položaj.
Drugo, kompozitni stub volana ima tendenciju da se "provali". slučaj nezgode smanjenje verovatnoće povrede vozača. Suština je da se u frontalnom udaru motor može pomaknuti unazad i gurnuti kormilarski zupčanik. Da je osovina stupa čvrsta, promjena položaja mehanizma dovela bi do izlaska osovine sa volanom u putnički prostor. U slučaju kompozitnog stupa, kretanje mehanizma će biti praćeno samo promjenom ugla jedne komponente osovine u odnosu na drugu, dok sam stup ostaje nepomičan.
Upravljački mehanizam
Dizajniran za pretvaranje rotacije osovine stupa upravljača u translacijske pokrete pogonskih elemenata.
Mehanizmi tipa "zupčasti zupčanik" najčešće se koriste u putničkim automobilima. Ranije se koristio još jedan tip - "valjkasti puž", koji se sada uglavnom koristi na kamionima. Druga opcija za kamione je "šraf".
"zupčanik"
Tip "gear-rack" postao je široko rasprostranjen zbog relativno jednostavan uređaj upravljački mehanizam. Ova strukturna jedinica sastoji se od tri glavna elementa - kućišta u kojem se nalazi zupčanik i letve okomito na njega. Između posljednja dva elementa postoji trajni zupčanik.

Ova vrsta mehanizma funkcionira ovako: zupčanik je čvrsto povezan sa stupom upravljača, tako da se rotira s osovinom. Zbog zupčastog spoja rotacija se prenosi na šinu, koja se na taj način pomiče unutar kućišta na jednu ili drugu stranu. Ako vozač okrene volan ulijevo, interakcija zupčanika sa letvom uzrokuje da se potonji pomakne udesno.
Često se na automobilu koriste mehanizmi zupčanika s fiksnim omjerom prijenosa, odnosno raspon rotacije volana za promjenu kuta kotača je isti za sve njihove položaje. Na primjer, recimo da za okretanje kotača pod uglom od 15 ° morate napraviti 1 puni okret volan. Dakle, bez obzira u kom položaju su upravljani točkovi (ekstremni, pravolinijski), da biste se okrenuli pod navedenim uglom, moraćete da napravite 1 obrt.
Ali neki proizvođači automobila ugrađuju mehanizme s promjenjivim omjerima prijenosa na svoje automobile. Štaviše, to se postiže prilično jednostavno - promjenom ugla položaja zubaca na šini u određenim zonama. Učinak ove modifikacije mehanizma je sljedeći: ako su kotači ravni, tada je potreban 1 okret da se njihov položaj promijeni za istih 15 ° (primjer). Ali ako su u ekstremnom položaju, tada će se zbog promijenjenog omjera prijenosa kotači nakon pola okreta okrenuti do navedenog kuta. Kao rezultat toga, domet upravljača od kraja do kraja je znatno manji nego kod mehanizma s fiksnim omjerom.

Stalak sa varijabilnim omjerom prijenosa
Osim jednostavnosti uređaja, koristi se i tip "gear-rack" jer je u takvom dizajnu moguće implementirati aktuatore hidrauličnog pojačivača (GUR) i električnog pojačivača (EUR), kao i elektrohidraulični (EGUR).
"Crv-valjak"
Sljedeći tip, "valjkasti crv", rjeđi je i sada se praktično ne koristi na putničkim automobilima, iako se može naći na VAZ automobilima klasične porodice.
Ovaj mehanizam je baziran na pužnom zupčaniku. Predstavlja pužni vijak sa navojem posebnog profila. Ovaj vijak se nalazi na osovini spojenoj na stub upravljača.
Valjak je u kontaktu sa navojem ovog puža, povezan sa osovinom na kojoj je postavljen dvonožac - polugom koja je u interakciji sa pogonskim elementima.

Pužni upravljač
Suština mehanizma je sljedeća: kada se osovina okreće, vijak se okreće, što dovodi do uzdužnog pomicanja valjka duž njegovog navoja. A budući da je valjak postavljen na osovinu, ovaj pomak je praćen rotacijom potonjeg oko svoje ose. To, zauzvrat, dovodi do polukružnog pokreta bipoda, koji djeluje na pogon.
Mehanizam tipa "puž-valjak" na putničkim automobilima napušten je u korist "zupčanika" zbog nemogućnosti integrisanja hidrauličnog pojačivača u njega (i dalje je bio dostupan na kamionima, ali je aktuator uklonjen), jer kao i prilično složen dizajn pogona.
Tip zavrtnja
Dizajn vijčanog mehanizma je još složeniji. Ima i navojni vijak, ali nije u kontaktu sa valjkom, već sa posebnom maticom, na vani na koji se primjenjuje nazubljeni sektor, u interakciji s istim, ali napravljen na osovini dvonožaca. Postoje i mehanizmi sa srednjim valjcima između matice i zupčastog sektora. Princip rada takvog mehanizma gotovo je identičan pužu - kao rezultat interakcije, osovina se okreće i povlači dvonožac, a to zauzvrat - pogon.

Zavojni upravljački mehanizam
Na vijčani mehanizam se može ugraditi hidraulični pojačivač (matica djeluje kao klip), ali se ne koristi na putničkim automobilima zbog masivne strukture, pa se koristi samo na kamionima.
Pogonska jedinica
Pogon u upravljačkoj strukturi se koristi za prijenos kretanja stalka ili dvonožaca na upravljane kotače. Štaviše, zadatak ove komponente je promijeniti položaj kotača pod različitim uglovima. To je zbog činjenice da se kotači prilikom okretanja kreću duž različitih radijusa. Dakle, točak sa unutra pri promjeni putanje kretanja mora se okretati pod većim uglom od vanjskog.
Dizajn pogona ovisi o korištenom mehanizmu. Dakle, ako se na automobilu koristi "zupčasti zupčanik", tada se pogon sastoji od samo dvije šipke spojene na zglob upravljača (čiju ulogu ima podupirač koji apsorbira udarce) pomoću kugličnog vrha.
Ove šipke se mogu pričvrstiti na šinu na dva načina. Manje uobičajena je njihova kruta fiksacija pomoću vijčanog spoja (u nekim slučajevima, veza se ostvaruje kroz tihi blok). Za takvu vezu, u tijelu mehanizma napravljen je uzdužni prozor.
Češća metoda spajanja šipki je kruta, ali fleksibilna veza s krajevima šine. Da bi se osigurala takva veza, na kraju obje šipke napravljen je kuglični vrh. Ova lopta se pomoću matice pritisne na šinu. Kada se potonji pomakne, šipka mijenja svoj položaj, što osigurava postojeću vezu.

U pogonima u kojima se koristi mehanizam puž-valjak, dizajn je mnogo komplikovaniji i predstavlja čitav sistem poluga i šipki, koji se nazivaju poluge upravljača. Tako, na primjer, na VAZ-2101 pogon se sastoji od dvije bočne šipke, jedne srednje, poluge klatna i zglobova upravljača s polugama. Istovremeno, kako bi se osigurala mogućnost promjene ugla kotača zaobljena pesnica pričvršćen za ruke ovjesa sa dva kuglična ležaja (gornji i donji).
Veliki broj sastavnih elemenata, kao i veze između njih, čine ovaj tip pogona podložnijim habanju i pojavi zazora. Ova činjenica je još jedan razlog za napuštanje pužnog zupčanika u korist zupčanika.
"povratne informacije"
Treba napomenuti da se u upravljačkom mehanizmu nalazi i tzv. Povratne informacije". Vozač ne samo da djeluje na točkove, već preko njega prima i informacije o karakteristikama kretanja točkova na putu. To se manifestira u vidu vibracija, trzaja, stvaranja definitivno usmjerenih napora na volanu. Ova informacija se smatra veoma važnom za ispravnu procjenu ponašanja automobila. Dokaz za to je činjenica da su u automobilima opremljenim servo i servo upravljačem dizajneri zadržali "povratne informacije".
Napredni razvoj
Ova jedinica nastavlja da se usavršava, tako da su najnovija dostignuća sistemi:
- Aktivno (dinamičko) upravljanje. Omogućava vam da promijenite omjer prijenosa mehanizma ovisno o brzini vozila. Također izvodi i dodatna funkcija- Korekcija ugla prednjih točkova pri skretanju i pri kočenju na klizavom putu.
- Prilagodljivo upravljanje (žicano vođeno). Ovo je najnoviji i najperspektivniji sistem. Ne postoji direktna veza između volana i točkova, sve radi zahvaljujući senzorima i aktuatorima (servo pogoni). Sistem još nije postao široko rasprostranjen zbog psiholoških i ekonomskih faktora.

Sistem kormila po žici
Zaključak
Općenito, mehanizam je prilično pouzdana jedinica koja ne zahtijeva nikakvo održavanje. Ali u isto vrijeme, rad upravljača automobila podrazumijeva pravovremenu dijagnostiku za prepoznavanje kvarova.
Konstrukcija ove jedinice sastoji se od mnogo elemenata sa pokretnim spojevima. A tamo gdje postoje takvi spojevi, s vremenom, zbog istrošenosti kontaktnih elemenata, u njima se pojavljuju zazori, što može značajno utjecati na upravljivost automobila.
Težina dijagnostike upravljača ovisi o tome strukturne performanse... Dakle, u čvorovima s mehanizmom zupčanika, nema toliko veza koje treba provjeriti: vrhovi, spoj zupčanika sa letvom, kardani stupa upravljača.
Ali kod pužnog zupčanika, zbog složenog dizajna pogona, postoji mnogo više dijagnostičkih točaka.
U vezi radovi na renoviranju u slučaju kvara jedinice, zatim savjete kada teško habanje jednostavno se zamjenjuju. U upravljačkom mehanizmu, u početnoj fazi, zazor se može ukloniti podešavanjem zahvata, a ako to ne pomogne, ponovnom izgradnjom sklopa pomoću kompleta za popravak. Kardani stupca, kao i vrhovi, se jednostavno mogu zamijeniti.
AutoleekPostoji nekoliko vrsta upravljača. Svesni ste da kada okrenete volan, točkovi vašeg automobila se okreću. Ali između okretanja volana i okretanja kotača odvijaju se određene radnje.
U ovom članku ćemo se osvrnuti na karakteristike dvije najčešće vrste upravljačkog mehanizma: zupčanika i zupčanika i upravljačkog mehanizma s kugličnom maticom. Također ćemo razgovarati o servo upravljaču i učiti o zanimljivim tehnologijama za razvoj sistema upravljanja koji mogu smanjiti potrošnju goriva. Ali prije svega, pogledat ćemo kako dolazi do skretanja. Nije sve tako jednostavno kao što se čini.
Okretanje auta
 Možda ćete biti iznenađeni kada saznate da točkovi na prednjoj osovini prate različite putanje prilikom skretanja.
Možda ćete biti iznenađeni kada saznate da točkovi na prednjoj osovini prate različite putanje prilikom skretanja. Da bi se osiguralo glatko okretanje, svaki točak treba da kruži drugačijim krugom. Zbog činjenice da unutrašnji točak opisuje točak manjeg radijusa, on pravi oštriji okret od spoljašnjeg. Ako nacrtate okomicu na svaki točak, linije će se ukrštati u središnjoj tački stožera. Geometrija upravljača prisiljava unutrašnji točak da se okreće više od vanjskog.
Postoji nekoliko vrsta kormilarskog uređaja. Najčešći su upravljanje zupčanikom i zupčanikom i upravljanje s kugličnom maticom.
Zupčanik i zupčanik
 Zupčanik i zupčanik se široko koristi u putničkim automobilima, lakim kamionima i SUV-ovima. Zapravo, mehanizam je prilično jednostavan. Zupčanici letve se nalaze u metalnoj cevi sa letvom koja viri sa svake strane. Upravljački kraj se povezuje sa svakom stranom stalka.
Zupčanik i zupčanik se široko koristi u putničkim automobilima, lakim kamionima i SUV-ovima. Zapravo, mehanizam je prilično jednostavan. Zupčanici letve se nalaze u metalnoj cevi sa letvom koja viri sa svake strane. Upravljački kraj se povezuje sa svakom stranom stalka. Zupčanik je uparen sa osovinom upravljača. Kada okrenete volan, zupčanik počinje da se okreće i pokreće letvu. Vrh upravljača na kraju stalka povezuje se sa bipodom upravljača na vretenu (pogledajte ilustraciju).
Funkcije letvice zupčanika su sljedeće:
- Pretvara rotaciono kretanje volana u pravo kretanje potrebno za okretanje točkova.
- Pruža omjer prijenosa koji olakšava okretanje kotača.
Omjer prijenosnika upravljača je omjer stepena upravljanja i stepena upravljanja. Na primjer, ako jedan puni okret volana (360 stupnjeva) okrene točak za 20 stupnjeva, tada je omjer prijenosa upravljača 18: 1 (360 podijeljeno sa 20). Što je veći omjer, to je veći stepen upravljanja. Štaviše, što je veći omjer, potrebno je manje napora.
Obično u plućima sportski automobili omjer prijenosa upravljača je manji od onog kod velika vozila i kamioni. Sa niskim omjerom prijenosa, odziv upravljača je brži, tako da ne morate nasilno okretati volan da biste skrenuli. Kako manji auto, što je manja njegova masa, i, čak i sa niskim omjerom prijenosa, ne zahtijeva dodatni napor za okretanje.
Postoje i automobili sa promjenjivim omjerom prijenosa upravljača. U ovom slučaju, letva sa zupčanikom ima različit nagib (zubi po inču) u sredini i sa strane. Kao rezultat toga, automobil brže reagira na okretanje volana (nosač je bliže centru), a smanjen je i napor pri okretanju volana do kraja.
Zupčanik i servo upravljač
U prisustvu servo upravljača sa letvom i zupčanikom, letva ima nešto drugačiji dizajn. Dio stalka uključuje cilindar sa klipom u sredini. Klip je spojen na letvu. Na obje strane klipa postoje dvije rupe. Zalihe tečnosti ispod visokog pritiska na jednoj od strana klipa pokreće klip, okreće letvu, pružajući pojačanje upravljačkog mehanizma.
Dio stalka uključuje cilindar sa klipom u sredini. Klip je spojen na letvu. Na obje strane klipa postoje dvije rupe. Zalihe tečnosti ispod visokog pritiska na jednoj od strana klipa pokreće klip, okreće letvu, pružajući pojačanje upravljačkog mehanizma. Upravljački mehanizam sa kuglastom maticom
Upravljački uređaj s kugličnim navrtkom može se naći na mnogim kamionima i terenskim vozilima. Ovaj sistem malo drugačiji od letve i zupčanika.Upravljački zupčanik kuglične matice uključuje pužni zupčanik. Uobičajeno, pužni zupčanik se može podijeliti na dva dijela. Prvi dio je metalni blok s rupom s navojem. Ovaj blok ima zupce sa vanjske strane koji se spajaju sa zupčanikom koji pokreće ruku upravljača (vidi sliku). Volan je spojen na navojnu šipku, sličnu vijku, ugrađenu u navojnu rupu u bloku. Kada se volan okreće, vijak se okreće s njim. Umjesto uvrtanja u blok kao kod konvencionalnih vijaka, ovaj vijak je osiguran tako da kada se rotira, pokreće blok, koji zauzvrat pokreće pužni zupčanik. 
Vijak se ne uvlači u blok jer je ispunjen kugličnim ležajevima koji kruže kroz mehanizam. Kuglični ležajevi se koriste u dvije svrhe: smanjuju trenje i habanje prijenosa, a također smanjuju kontaminaciju mehanizma. Ako nema kuglica u prenosniku upravljača, zupci se neko vrijeme neće dodirivati i osjetit ćete da je volan izgubio krutost.
Servo upravljač u kutiji upravljača sa kugličnim maticom funkcionira na isti način kao u kutiji upravljača sa letvom i zupčanikom. Ojačanje se postiže dovodom tečnosti pod visokim pritiskom na jednu stranu bloka.
Servo upravljač

 Osim samog upravljačkog mehanizma, servo upravljač uključuje nekoliko glavnih komponenti.
Osim samog upravljačkog mehanizma, servo upravljač uključuje nekoliko glavnih komponenti. Pumpa
Pumpa s lopaticama opskrbljuje upravljački mehanizam hidrauličnom snagom (vidi sliku). Motor pokreće pumpu pomoću remena i remenice. Pumpa uključuje udubljene lopatice koje rotiraju u komori ovalnog oblika.Kako se noževi rotiraju, hidraulična tekućina se istiskuje nizak pritisak od povratnog voda do izlaza visokog pritiska. Brzina protoka ovisi o broju okretaja motora automobila. Dizajn pumpe obezbeđuje potrebnu visinu čak i na idle... Kao rezultat toga, pumpa pokreće više tekućine kada motor radi duže visoki okretaji.
Pumpa ima ventil za osiguranje odgovarajućeg pritiska, što je posebno važno pri velikim brzinama motora kada se dovodi velika količina tečnosti.
Rotacioni ventil
Servo upravljač bi trebao pomoći vozaču samo kada je sila primijenjena na volan (u krivinama). U nedostatku napora (na primjer, vožnja po pravoj liniji), sistem ne bi trebao pružati pomoć. Uređaj koji osjeća silu primijenjenu na volan naziva se rotacijski ventil.Glavna komponenta rotacionog ventila je torziona šipka. Torziona šipka je tanka metalna šipka koja se rotira pod dejstvom obrtnog momenta. Gornji kraj torzijske šipke je povezan sa volanom, a donji kraj je povezan sa zupčanikom ili pužnim zupčanikom (koji okreće točkove), pri čemu je obrtni moment torzione šipke jednak momentu koji vozač primenjuje na okrenite točkove. Što je veći primijenjeni obrtni moment, torziona šipka se više okreće. Ulazni dio osovine upravljača čini unutrašnjost rotacionog ventila. Također je spojen na vrh torzijske šipke. Dno torzijske šipke spojeno je s vanjskom stranom rotacionog ventila. Torziona šipka također rotira upravljački zupčanik, spajajući se sa zupčanikom ili pužnim zupčanikom, ovisno o vrsti upravljačkog mehanizma.
Prilikom okretanja, torziona šipka rotira unutrašnjost rotacionog ventila, dok vanjska strana ostaje nepomična. Zbog činjenice da je unutrašnjost ventila također povezana sa osovinom upravljača (a samim tim i s volanom), broj okretaja unutarnje strane ventila ovisi o momentu koji primjenjuje vozač.
Kada upravljač miruje, obje hidraulične cijevi pružaju jednak pritisak na zupčanik. Ali kada se ventil okrene, kanali se otvaraju za dovod tekućine pod visokim pritiskom u odgovarajuću cijev.
Praksa je pokazala ne najveću efikasnost ove vrste servo upravljača.
Inovativni servo upravljač
Budući da pumpa servo upravljača na većini vozila neprekidno pumpa tekućinu, troši energiju i gorivo. Logično je računati na brojne inovacije koje će poboljšati ekonomičnost goriva. Jedna od najuspješnijih ideja je kompjuterski kontrolisan sistem. Ovaj sistem potpuno eliminiše mehaničku vezu između volana i upravljačkog mehanizma, zamenjujući je elektronski sistem menadžment.U stvari, volan radi na isti način kao i volan za kompjuterske igrice. Volan će biti opremljen senzorima za davanje signala automobilu o smjeru kretanja točkova i motora, koji daju odgovor na radnje automobila. Izlaz iz ovih senzora će se koristiti za kontrolu servo upravljača. Ovo eliminira potrebu za osovinom upravljača, što povećava slobodan prostor u motornom prostoru.
General Motors je predstavio konceptni automobil Hy-wire, koji već ima takav sistem. Prepoznatljiva karakteristika takav sistem sa elektronsko upravljanje od GM-a je da možete sami prilagoditi upravljanje automobilom koristeći novi računar softvera bez zamjene mehaničkih komponenti. U elektronski kontrolisanim vozilima budućnosti, možete prilagoditi sistem upravljanja po svom ukusu sa samo nekoliko tastera. Sve je vrlo jednostavno! Upravljački sistem se nije mnogo promijenio u proteklih pedeset godina. Ali sljedeća decenija će biti era automobila sa štedljivim gorivom.


